
Development trend and key technologies of autonomous underwater vehicles

-
摘要: 为推进和引导我国自主水下航行器(AUV)的发展,总结国内外AUV的研究现状,提出其系列化、集群化、体系化、大型化的发展趋势。重点探讨AUV总体多学科优化设计、结构与材料设计、动力与推进、导航与控制、探测与通信等关键技术,为更好地利用AUV经略海洋,从而实现“进入海洋、探测海洋、利用海洋”的战略目标提出发展意见。Abstract: In order to promote and guide the development of autonomous underwater vehicles (AUVs) in China, this paper summarizes the research status of AUVs at home and abroad, and puts forward the development trends of serialization, grouping, systematization and large-scale development. Key AUV technologies such as overall multidisciplinary optimal design, structure and material design, power and propulsion, navigation and control, detection and communication are discussed. Finally, development opinions are put forward on how to make better use of AUVs to navigate the oceans and achieve the strategic goals of "ocean entry, ocean exploration and ocean utilization".
-
0. 引 言
近20年来,与无人机的井喷式发展类似,水下无人航行器(unmanned underwater vehicle,UUV)也步入了发展的快车道。目前,世界上的UUV已达数百种,活跃在海洋科学、海洋工程、水下安防和水下作战等领域。UUV作为一种主要以潜艇或水面舰船为支援平台,可长期在水下自主航行并可回收的智能化装备,能搭载多种传感器、专用设备或武器模块,执行特定的任务使命。当前,UUV因其自主、灵活和多用途性,可代替人在恶劣环境下执行枯燥和危险的任务,具有机动性强、适应能力和生存能力高、无人员伤亡风险、制造和维护成本低等优点[1]。根据自主性等级,可将UUV分为自主水下航行器(autonomous undersea vehicle,AUV)和遥控水下航行器(remotely operated vehicle,ROV)2类。其中,AUV是自带能源,采用自主控制模式,作业范围更广;ROV是通过光电缆与母船相连,用于接收母船的控制指令并进行能源供给,作业范围相对受限[2]。
据不完全统计,目前国外主要有十多个国家的20多家科研机构在从事UUV的研发工作,其中以美国在研的水下航行器的数量最多,发展技术也最为成熟。美国对军事高科技历来保持着高度敏感性,其针对UUV制定了一系列发展规划。2000年,美国海军在综合考虑未来50年需求的情况下制定了一个中远期发展规划《UUV总体规划》,并确定了未来UUV优先发展的4个特征能力:潜艇跟踪和追猎、海事侦察、水下搜索和调查,以及通信和导航援助。2004年,美国海军对该规划进行了修订,将UUV的任务扩展为9项,包括情报/监视/侦察、反水雷战、反潜战、检查与识别、海洋调查、通信/导航网络节点、负载投送、信息作战以及时敏打击,并提出了多UUV的概念。之后,美国海军再未单独针对UUV发布规划,而是由美国国防部对陆、海、空各类无人系统进行统筹规划。2007年,美国国防部发布了《2007—2032年无人系统发展路线图》,首次提出了地面、水下、空中统一的无人系统总体发展战略规划,并表示在未来25年美国将逐步建立一支完善而先进的无人作战部队。随后,美国国防部又先后于2009年、2011年和2013年对无人系统的发展路线图进行了修订,进一步强调了陆海空各无人系统的协同工作能力。2016年10月,美国国防科学委员会发布了《下一代水下无人系统》报告,针对美国国防部在下一个10年及以后如何维持水下优势提出了重要建议[3]。
2019年6月,美国国会研究处(congressional research service,CRS)发布了《海军大型水面无人艇和水下无人航行器:背景及相关考虑的问题》,报告称,美国海军计划于2021年及以后研发并采购大型UUV,该大型UUV可为小型UUV集群提供能源补给、平台发射、环境评估等水下作战保障。
2021年7月,美国海军部发布了《智能自主系统科技战略》,提出了增强现有能力、扩展多域能力和形成全新能力三大发展愿景,设置了能力类、人员与流程类以及合作伙伴关系类这3类共9项战略目标,并从作战和科学2个方面分析了智能自主系统的影响。该战略旨在以智能自主系统为抓手,促进无人系统、人工智能、自主化技术交叉融合,缩短研发、转化、应用的进程,加速颠覆性作战能力的形成和作战方式的变革。
相较于国外水下无人航行器的发展,我国在该领域的研究起步较晚[4],但近年来随着我国对海洋资源的重视以及海洋强国战略的提出,相继发布了《面向2035年的海洋领域科技发展战略研究》《海洋环境安全保障与岛礁可持续发展》《深海和极地关键技术与装备》等规划和指南,对UUV的发展和应用提出了指导性意见。
本文将从系列化、集群化以及体系化3个方面分析国内外AUV的发展现状及趋势,重点探讨AUV总体多学科优化设计、结构与材料设计、动力与推进、导航与控制、探测与通信等关键技术,阐述其内涵、难点及解决途径,提出AUV各技术的发展路线并给出建议。
1. AUV发展趋势
通过分析美国20多年来发布的水下航行器总体规划及路线图,不难发现AUV正呈系列化、集群化及体系化的发展趋势。同时,为满足联合紧急作战需求,超大型AUV将是未来水下无人系统发展的重点。
1.1 系列化
自主推进式水下航行器由于其面世时间最久,发展年限最长,因此该类产品的系列化发展特征最为明显。商业上比较成功的AUV主要有5个产品系列:Bluefin,Remus,Hugin,ISE Explorer和Gavia[5]。
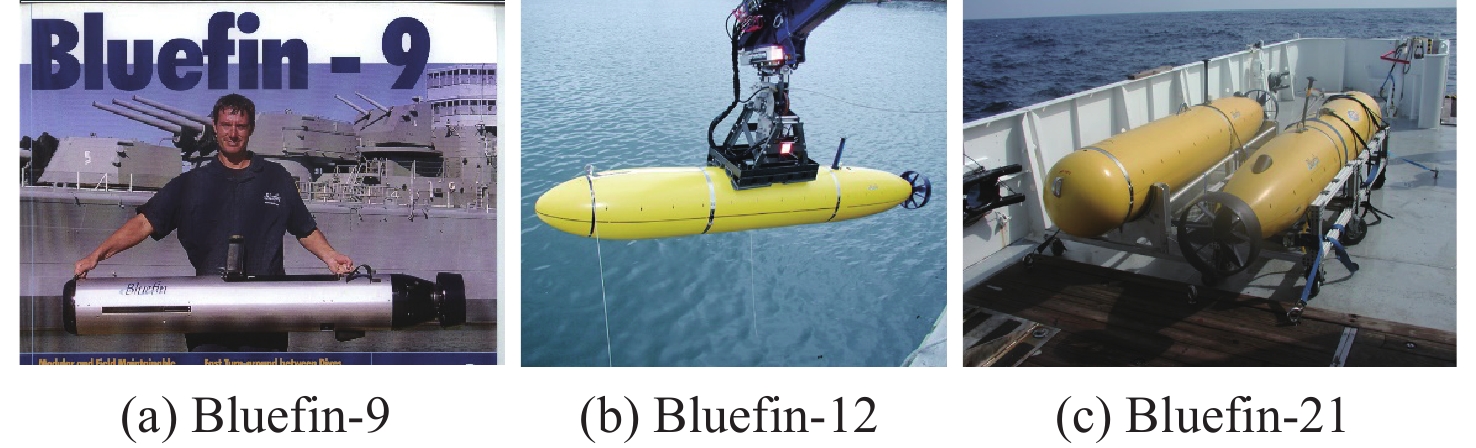
1989年,美国工学院自主水下航行器实验室成功研制出Bluefin水下航行器,后成立了“金枪鱼”机器人公司,该公司从Bluefin-9起步,相继研发了Bluefin-12,Bluefin-21等型号(图1),各型号的参数如表1所示。Bluefin-21在中型水下航行器中技术发展较为成熟,应用较广泛,可根据不同的用途配备不同的传感器和载荷,与其他同类型产品相比,具有导航精度高、可靠性好等优势。2014年,Bluefin-21在南印度洋参与了MH370失联客机的搜救行动,备受瞩目。
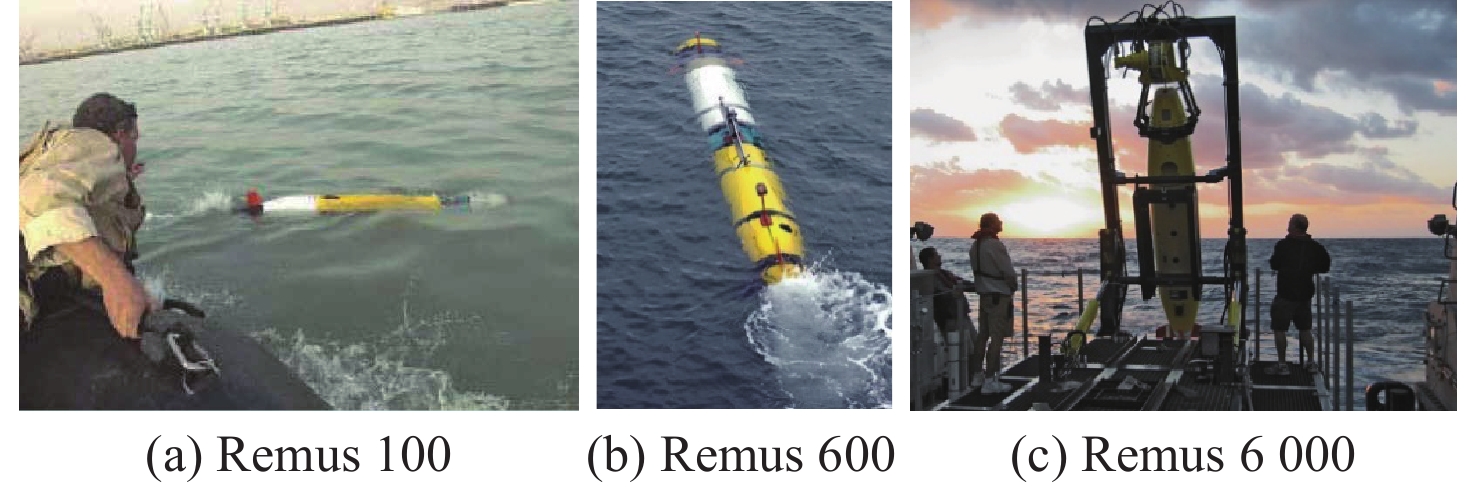
表 1 Bluefin系列水下航行器设计参数Table 1. Design parameters of Bluefin series of underwater vehicle型号 长度/m 直径/m 重量/kg 最大工作深度/m 续航力/h Bluefin-9 1.65 0.240 50 200 12 (3 kn) Bluefin-12S 3.66 0.324 213 200 20 (5 kn) Bluefin-12D 4.33 0.324 260 1500 30 (4 kn) Bluefin-21 3.80 0.656 750 4500 25 (4 kn) 美国伍兹霍尔海洋研究所设计的Remus 100是美国最成功的便携式水下航行器,为Remus系列航行器(图2)中最小的一款。该航行器采用锂电池供电,以3 kn的巡航速度可连续航行22 h,最大航程达123 km。针对反水雷、深海探测、海上搜救等任务需求,该公司又相继研发了Remus 600,Remus 6000等型号的水下航行器,设计参数如表2所示,被广泛应用于北约国家海军。在2003年的“自由伊拉克”军事行动中,美国海军在伊拉克乌姆卡斯尔港开展入港航道和港湾清理工作的过程中使用了Remus 100,其在一个月的时间里一共成功发现了237个水下目标,其中100个被认定为水雷。
表 2 Remus系列水下航行器设计参数Table 2. Design parameters of Remus series of underwater vehicle型号 长度/m 直径/m 重量/kg 最大工作深度/m 续航力/h Remus 100 1.32 0.190 37 100 15 (3 kn) Remus 600 3.25 0.324 240 600 70 (5 kn) Remus 3000 3.70 0.356 335 3 000 44 (4 kn) Remus 6000 3.84 0.71 864 6 000 22 (4 kn) Bluefin和Remus系列水下航行器是美国水下无人装备系列化发展最为明显的两型装备,均有不同口径的系列化产品,可通过搭载不同的传感器和探测器来适应不同深度、不同海况下的工作任务。这两型系列化水下航行器在前期的发展中均积累了充分的民用成熟技术,转而可满足军事需求,但相比之下,Remus系列水下航行器在军事应用方面的战场经验更多,而Bluefin系列水下航行器在民用市场更受欢迎,已出口多个北约国家。
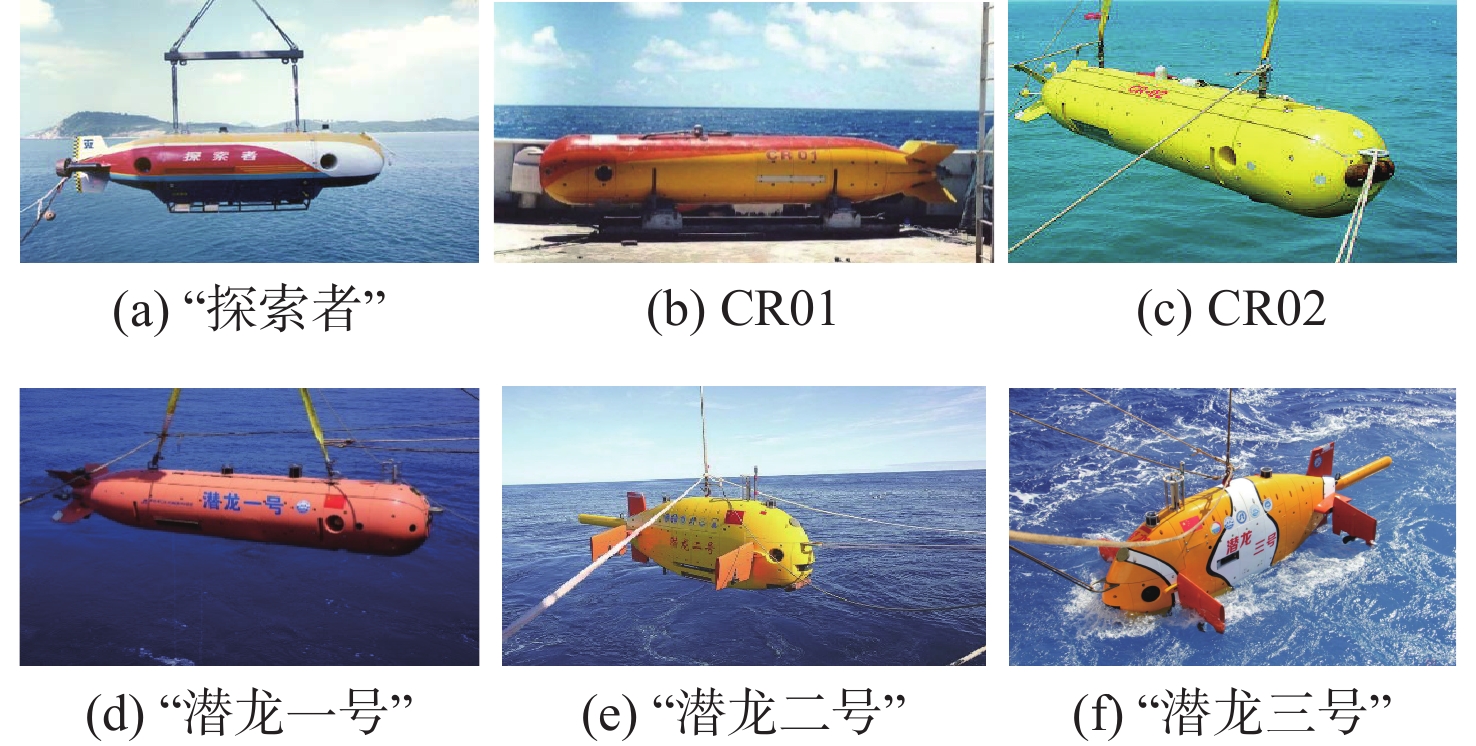
中科院沈阳自动化研究所在AUV领域一直处于国内优势地位,经过30多年的技术攻关,已形成深海和长航时两大系列,先后研制了“探索者”、CR01和CR02、“潜龙一号”、“潜龙二号”及“潜龙三号”,如图3所示。其中,“潜龙三号”是潜龙系列中最新一代的水下航行器,实现了我国AUV首次在大西洋科考上的应用,标志着我国AUV技术跻身世界先进行列[1]。
![]() 图 3 中科院沈阳自动化研究所研制的系列水下航行器Figure 3. A series of underwater vehicles developed by Shenyang Institute of Automation Chinese Academy of Sciences
图 3 中科院沈阳自动化研究所研制的系列水下航行器Figure 3. A series of underwater vehicles developed by Shenyang Institute of Automation Chinese Academy of Sciences哈尔滨工程大学联合中科院等国内优势单位,经过10余年的攻关,突破多项重大关键技术,成功研制出了HSU001 AUV(图4),使我国在高性能航行器的研发和制造方面走在了世界前列。HSU001长约5 m,直径约1 m,排水量约3 t,尾部采用双螺旋桨设计,保证了航行器的灵活性;扁平的头部装有大型声呐,用于探测水下目标;背部携带有2根桅杆,在不使用时可向下折叠成流线型船体。HSU001是我国海军的智能化平台,集战场环境侦察、敌情监视等多种功能于一身,是未来无人作战的典型装备。
![]() 图 4 哈尔滨工程大学研制的HSU001水下航行器Figure 4. HSU001 underwater vehicle developed by Harbin Engineering University
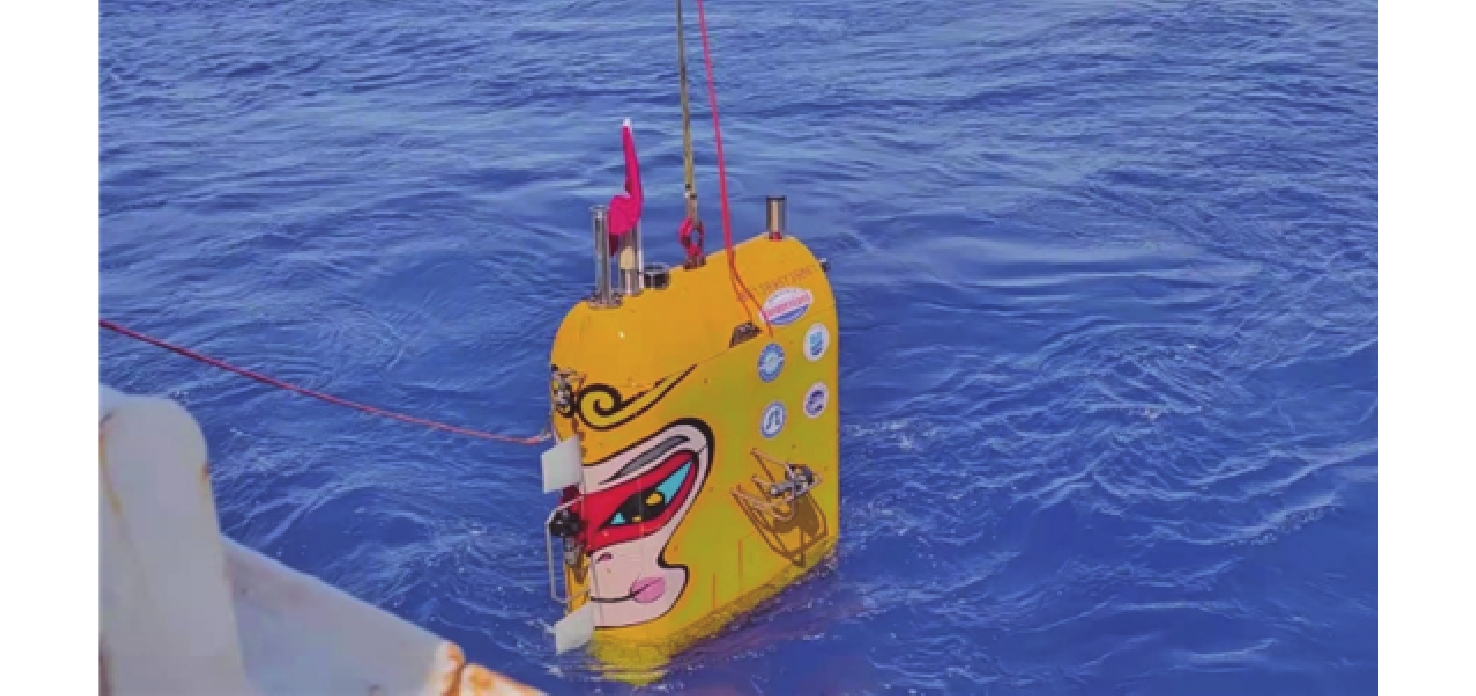
图 4 哈尔滨工程大学研制的HSU001水下航行器Figure 4. HSU001 underwater vehicle developed by Harbin Engineering University“悟空”号是由哈尔滨工程大学牵头设计研发的另一型水下航行器。该型水下航行器长约2 m,宽约1 m,重量约1.3 t,是一款超大深度、可实现地球上所有海洋区域探测的深海无人航行器,如图5所示。该水下航行器拥有极高的耐压强度,根据测试数据,可与母船在相距15 km的深海中进行上行峰值通信速率2 003 kbit/s、数据包接收正确率超过93%的出色信息传输。2021年11月,“悟空”号全海深AUV在马里亚纳海沟“挑战者”深渊完成了10 896 m的深潜挑战,标志着该型AUV已具备不需母船的伴随和支持,能独立进行万米水下自主工作的能力。
![]() 图 5 哈尔滨工程大学研制的“悟空”号全海深AUVFigure 5. Wukong full-sea deep AUV developed by Harbin Engineering University
图 5 哈尔滨工程大学研制的“悟空”号全海深AUVFigure 5. Wukong full-sea deep AUV developed by Harbin Engineering University除AUV外,国内在水下滑翔机的研究方面也取得了重大突破。天津大学于2002年开始第1代水下滑翔机的研发工作,于2005年完成了温差能驱动水下滑翔机样机的研制并进行了海上试验,2009年,又研制出了“海燕”(Petrel)混合推进水下滑翔机。2017年8月,“海燕”水下滑翔机在南海北部执行立体组网观测任务时,先后正面遇到了台风“天鸽”和“帕卡”,“海燕”编队对台风进行了现场观测,水下滑翔机距台风中心最近只有10 km左右,获取了台风过境时的珍贵数据,充分验证了“海燕”在极端条件下的可靠性。2018年1~5月,天津大学长航程“海燕-L”水下滑翔机在南海北部进行了连续119天、862个剖面、2 272.4 km航程的安全滑翔试验,将我国水下滑翔机的观测续航能力提升到了4个月。2020年7月,第2代“海燕-X”深渊级水下滑翔机连续下潜超过万米,最深至10 619 m,标志着万米深海研究迈入无人持续断面观测新时代[6]。图6示出了“海燕”系列水下滑翔机。
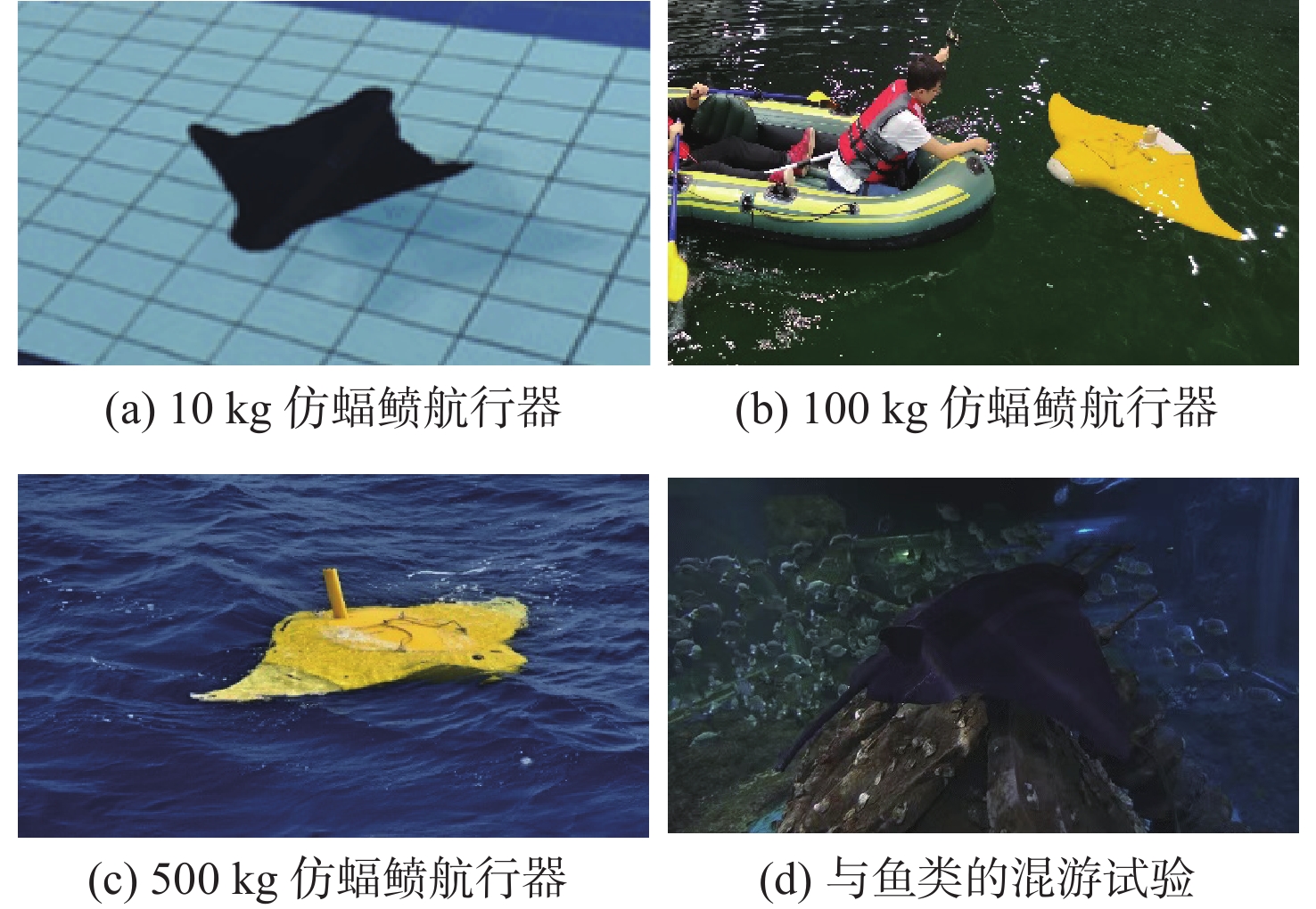
20世纪90年代,仿生型水下航行器开始进行样机研制,最开始主要是进行理论研究与模型分析。从仿生推进模式上讲,仿生型水下航行器可以分为为身体/尾鳍(body/caudal fin,BCF)推进模式(如金枪鱼、海豚等)和中间鳍/对鳍(medianand/paried fin,MPF)推进模式(如蝠鲼、鹰嘴鳐等)。BCF推进模式主要由鱼体或尾鳍的波动产生推进力,胸鳍多起辅助推进或掌控平衡与方向的作用;MPF推进模式以胸鳍或腹鳍为推进力的主要来源,其通过改变鳍的波形、波幅、频率及左右鳍摆动的相位差来控制推力及转弯力矩等。一直以来,基于BCF的模式具有更高推进速度和推进效率的思想,研究人员开发的仿生航行器样机多采用尾鳍推进模式,且技术日趋成熟。但生物学研究表明,具有MPF推进模式的鱼类更能利用流体力学效应以及非高速运动需求时的水下滑翔来提高游动效率,使其获得并不逊于BCF推进模式的游动效率[7]。西北工业大学自主水下航行器团队自2015年起,以蝠鲼为仿生对象,研制了10,100,500 kg共3个系列的仿蝠鲼水下航行器(图7),兼具长航程、高机动、高隐身、高生物亲和性的特点,实现了仿蝠鲼水下航行器原地转弯、快速俯仰、原位保持、急停急起、零速爬升及倒游等功能。2021年3月,在我国南海海域完成了具有应用能力的仿蝠鲼水下航行器在1 025 m大深度的航行试验,验证了其滑扑一体推进、无线通信、安保功能的可靠性以及海上布放与回收方法的有效性。2022年3月,在海洋馆完成了与鱼类的混游试验,结果显示不会造成鱼类的惊扰,充分证明了仿蝠鲼水下航行器的高机动能力和高生物亲和性。
1.2 集群化(单类多个)
无人系统是改变未来战争模式的颠覆性技术,而集群化是无人系统的重要发展方向。无人集群的概念最早是应用于无人机。早在2005年美国国防部发布的《无人机系统路线图2005—2030》中,便将无人机的全自主集群作为最终发展目标。随着水下无人平台自主性和对外互操作能力的提升,聚焦多个航行器的水下无人集群系统逐渐被重视。2011年11月,美军颁布了《海军科学技术战略规划》,首次构想了建立包含无人系统在内的混合海上部队。2014年,美国智库发布了《战场机器人:即将到来的蜂群》的报告,系统地提出了无人系统蜂群战术,并先后开展了多个水下无人集群应用项目的研究及试验验证。
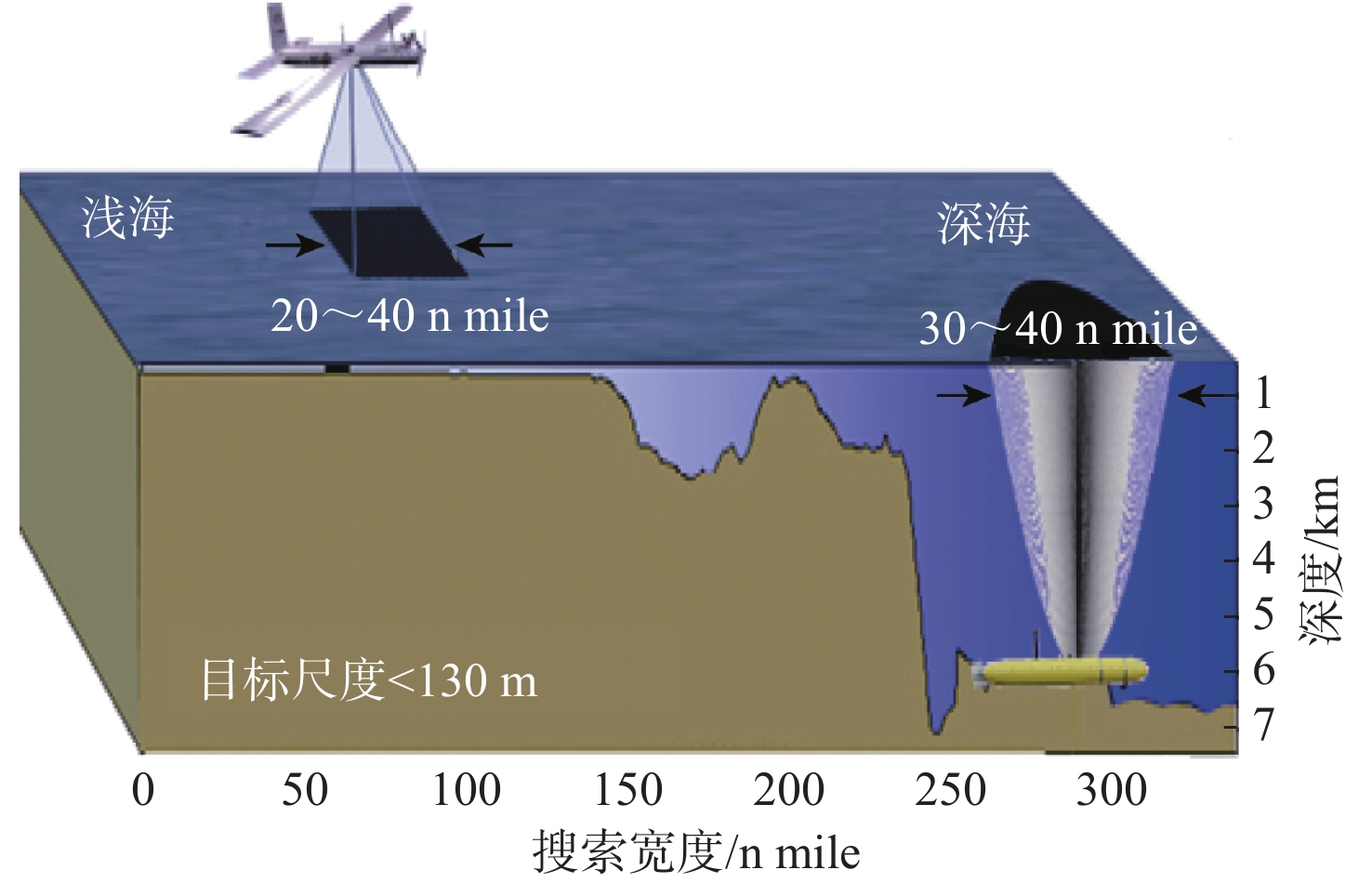
所谓水下无人集群,是指由多个具有一定自主决策能力,彼此之间存在指挥控制和通信的关系,且共同承担给定使命任务的由水下无人平台所构成的群组。2011年,美军国防高级研究计划局(DARPA)提出了分布式敏捷反潜(distributed agile submarine hunting,DASH)系统,如图8所示,其由深海和浅海2套子系统组成。这2套子系统在探测方式和探测区域上互补,可提高侦察探测效率。其中,在深海利用多艘配备主动声呐的UUV对上方海域进行监测,可及时发现所在海域内的潜艇。DARPA公布的数据显示,单个UUV潜伏于海底6 000 m处时,其监测范围直径可达55~75 km,50个UUV即可完成监视18万平方公里海域的任务。美国于2013年4月的试验表明,UUV的通信和机动探潜能力能够满足DASH系统的需要,证明概念可行,目前,美国正在加快有关装备的实现[8]。
国内在水下航行器集群方面的研究主要以天津大学、中科院沈阳自动化研究所和西北工业大学等单位为代表(图9)。2017年8月,天津大学的12台“海燕”号水下滑翔机完成了世界上持续时间最长、投放设备最多、覆盖海域最广的海洋“中尺度涡”立体综合观测任务,对南海“中尺度涡”的形成机理研究具有重要的科学价值。2019年12月,中科院沈阳自动化研究所的12台“海翼”滑翔机首次完成了在印度洋的集群观测应用,完成了3 400多个剖面的科学观测,获得了包括温度、盐度、浊度、含氧量等在内的大量水文数据。2021年7月,西北工业大学针对浅水濒海区域水下目标探测的需求,开展了水下航行器自主跟踪目标、多航行器协同探测等技术研究,其利用3台“勇毅”号水下航行器实现了集群三角队形和一字队形的快速变换和高精度保持,为形成颠覆性的探测能力奠定了基础。
1.3 体系化(多类多个)
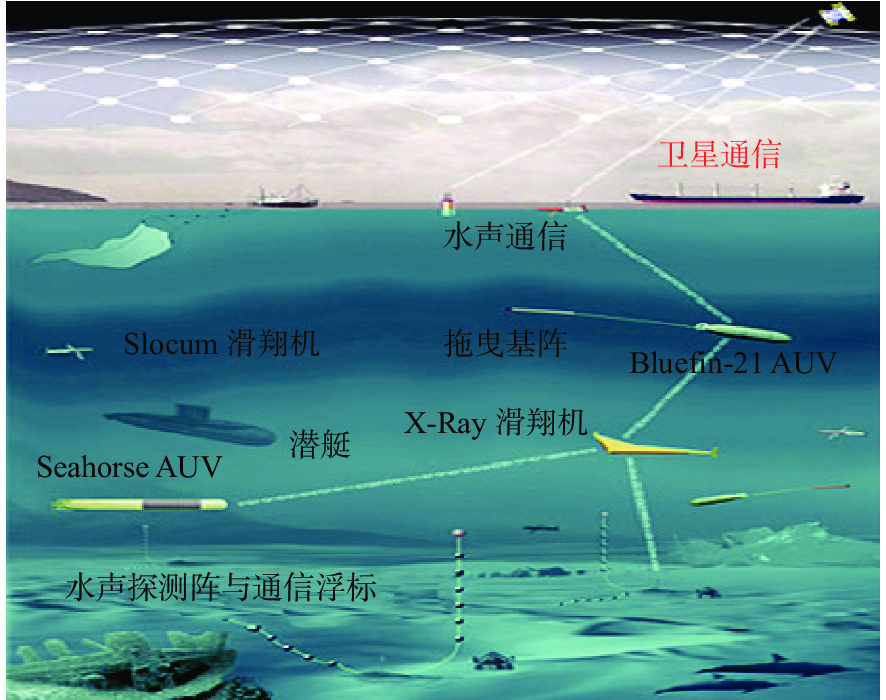
建设集群移动式UUV+固定式水下装备信息体系,发挥水下预警探测能力一直是美军关注的重点,用于利用全球型水下信息体系来实现从空中−海面−水下多维空间的全天候监听、采集、记录和分析而得到的各种水声信息。美军于2006年开始研制的水下持续监视网(persistent littoral underwater surveillance network,PLUSNet)是以巡航导弹核潜艇为母节点,以核潜艇携带的UUV为移动子节点,以水下潜标、浮标、水声探测阵为固定子节点,而构成的一种潜布式海底固定+机动的水下网络,可获取海洋环境信息和水下目标信息,用以为水下作战提供支撑,如图10所示。该系统已于2015年形成作战能力[8]。该系统包括1个Seahorse AUV,6个Bluefin-21 AUV,1个X-Ray滑翔机,以及18个Slocum滑翔机的移动式节点和9个固定阵元节点。其中,移动式UUV节点的主要任务是水文测量、海底成像、海洋噪声和水下目标噪声侦测。
此外,美军还通过各种无人系统实现了水下平台的跨域通信。无人机、无人航行器等无人装备的发展和应用,使跨域通信中继的形式更为丰富,可灵活构建跨域通信链路。例如,DASH系统的深海系统携带有声学调制解调器,可向同样携带有声学调制解调器的波浪滑翔机发送数据,由其充当通信中继,可将接收到的数据继续发送给卫星或是岸基通信系统,从而实现跨域通信。在2016年的美国先进海军技术演习中,一艘潜艇发射了一具Bluefin-21无人航行器,随后Bluefin-21无人航行器又释放出了2具微型“沙鲨”无人航行器和1架“黑翼”无人机,由“黑翼”充当潜艇与“沙鲨”之间的通信中继,实现了跨域通信与指控,如图11所示。美国海军潜艇部队已于2018年正式列装“黑翼”潜射无人机,用于执行情报监视侦察、通信中继和目标指示任务。
1.4 大型化
按照直径大小,美国海军将AUV分为了小型、中型、大型和超大型(直径大于2.13 m)4类。相比之下,超大型AUV可以装载更多的载荷,能负担的任务更加多样化,持续执行任务的能力更强,在作战构想上更接近于有人驾驶潜艇。除具备基础性的情报、监视与侦察能力以外,超大型AUV作战能力正向水雷战、反潜战等领域发展[9]。
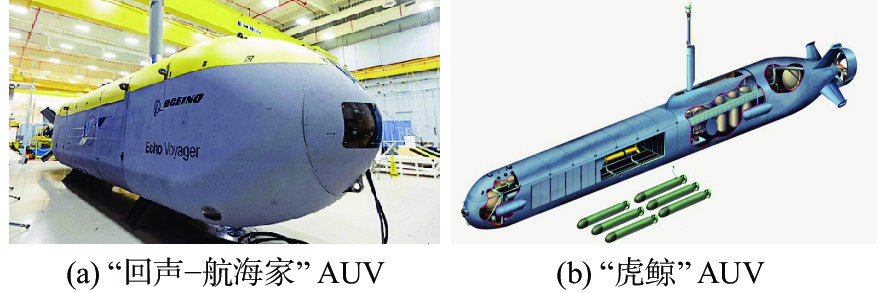
在美国海军于2019年1月公布的《无人航行器系统展望》中,其将大型AUV的发展分为了3个阶段:1)创新海军样机,主要开展自主性、有效载荷、自持力等方面的性能设计及试验验证,波音公司在该阶段研制出了“回声−航海家”(Echo-Voyager)AUV样机(图12(a));2)“虎鲸”超大型AUV项目(图12(b)),主要开展作战概念的开发、有效载荷的集成以及水雷战能力的设计与测试,已小批量交付未配备进攻性武器的超大型AUV;3)未来能力,主要拓展作战能力,形成具有多种作战能力的超大型AUV。目前,美国海军的超大型AUV正处于第2阶段。
2017年,美国波音公司发布公告,声称其研发的“回声−航海家”AUV已进行初次海上试验。该AUV长15.5 m,为“回声”家族的最大型,最高时速可达14.8 km/h,作业深度3 000 m。“回声−航海家”AUV上装有一个可折叠桅杆,该桅杆上集成了可自动识别海上船只的自适应信息系统以及1根通气管,具有卫星通信、供气及电池充电的能力;在采用锂电池供电的方案下,可持续航行2~3天,巡航航速下航程达280 km;在单燃料模式下,航程可达12 038 km。“虎鲸”AUV是在“回声−航海家”的基础上研制的,长24 m,直径2.5 m,重约63 t,最大航速10 kn。“虎鲸”AUV的主要改进点表现为:一是增加了中间有效载荷模块,舰体更显修长,可搭载的有效载荷空间更大,特别是为搭载重型鱼雷、反舰导弹和对陆打击导弹等武器提供了条件;二是采用带导管的泵喷推进器取代了开放式螺旋桨,与美军“海浪”级核潜艇的推进系统类似,可降低水下辐射噪声。
随着续航能力和自主水平的提升,超大型AUV将能够在远海域长时间、大范围地执行任务,其可以在以下至少4个方面发挥作用:反水雷战的力量倍增器、反潜战的助手与补充、情报/监视/侦察的中枢与中继、通道防卫的重要帮手。根据美军的最新规划,可以确定美军已将AUV作战当作一种主要的作战样式来加以推进,并将AUV列入了兵力结构。特别是引入了超大型AUV,探索了其在协同作战、海上战略通道防卫、水下情报/监视/侦察支援、自主反水雷作战等方面的功能,并在作战样式上进行了大胆创新,其设想极具前瞻性。
2. AUV关键技术
2.1 AUV总体多学科优化设计
AUV是典型的复杂机电系统,其总体设计涉及外形、结构、能源、推进、布局、控制等多个学科。传统的串行设计需要对AUV的总体系统反复迭代,导致其研制周期长、成本高。而多学科优化设计(multidisciplinary optimization design,MOD)方法是通过充分探索和利用协同机制来处理子系统间的耦合关系,可以在短时间内获取系统最优方案,缩短设计周期,降低研发成本,目前在航天、航空、航海等领域已得到广泛应用。在利用MOD方法开展AUV的总体设计时,需要构建各子学科模型,梳理学科关系,预报系统性能,最终获得系统的全局最优解。具体的关键技术如下所示。
2.1.1 参数化建模技术
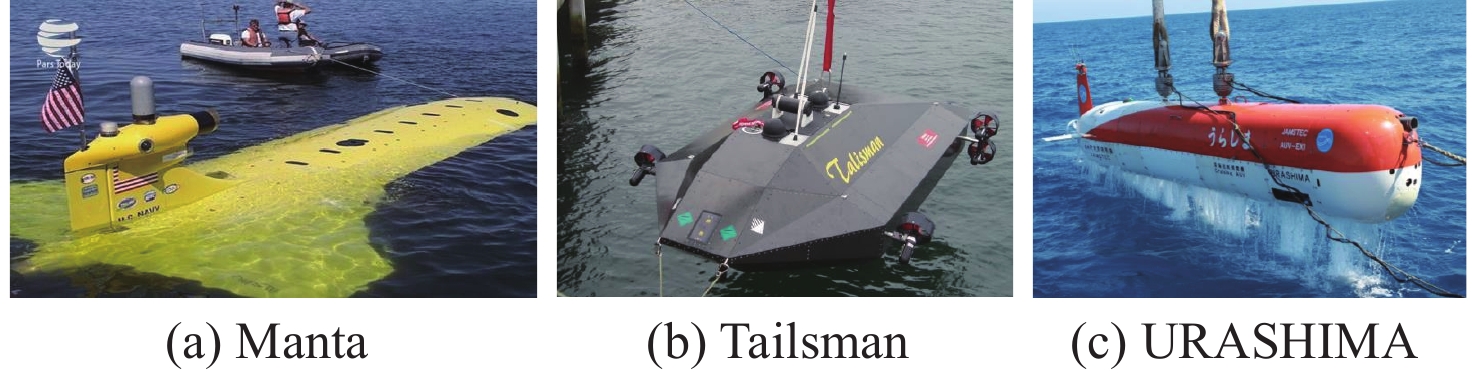
在回转体AUV的总体设计中,各个学科模型都积累了大量的设计经验,实现了基于数学公式的多学科优化设计应用。但随着AUV任务需求的变化,出现了大量非回转体新概念AUV,如美国的Manta、英国的Tailsman、日本的URASHIMA等(图13),原有的经验公式已不再适用于新概念AUV。因此,亟需发展基于模型的AUV多学科优化设计方法,利用参数化建模技术实现几何模型的迭代更新和系统性能的快速响应。
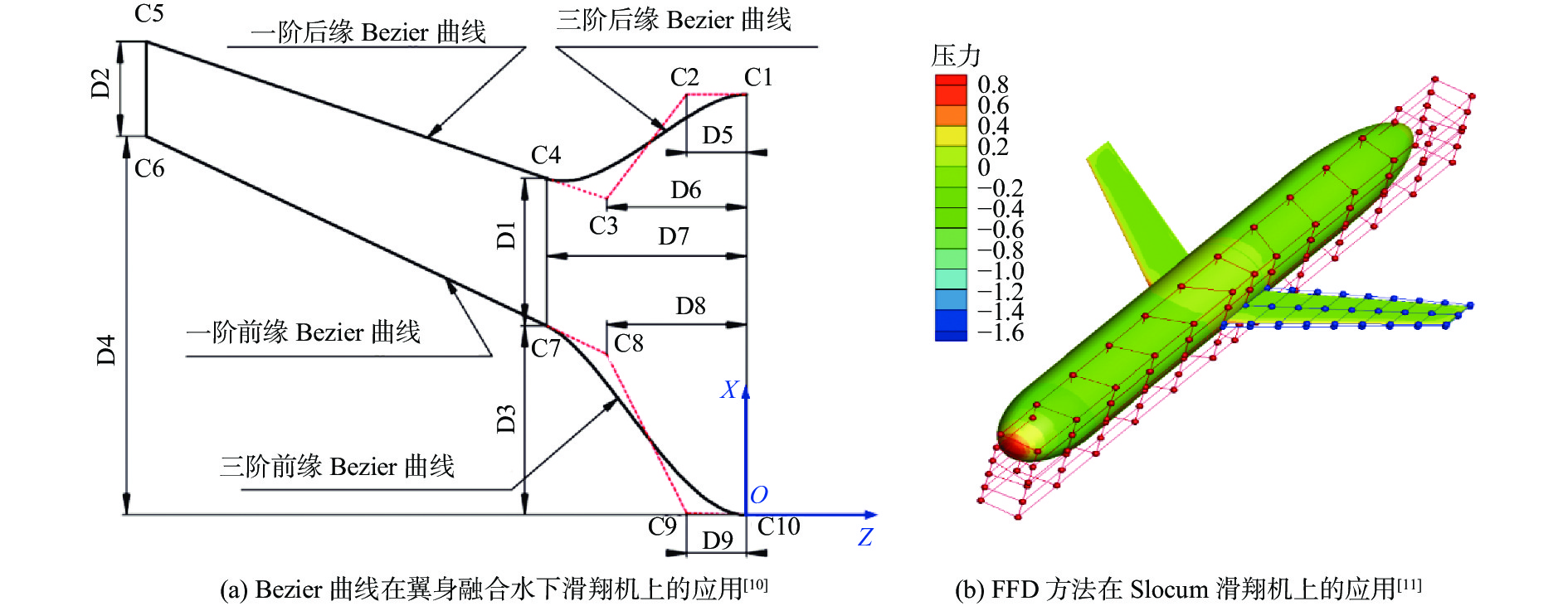
目前较为成熟的三维几何参数化方法可以分为2类:一类为定义法,即基于外形各部分的物理意义定义特征参数,实现几何建模;另一类为扰动法,具代表性的为自由变形(free-form deformation,FFD)方法,即通过对离散模型进行扰动来实现模型的变形。这2类方法均已应用于AUV的外形设计。图14所示为基于Bezier曲线的外形参数化和基于FFD的复杂外形参数化。图中:C1~C10为Bezier曲线的控制点;D1~D9为控制点的坐标差;图14(b)中红色的点为机体部分的FFD控制点;蓝色点为机翼部分的FFD控制点。
随着AUV总体设计的不断深入,未来参数化建模技术趋于更加智能化的方向。例如,基于深度学习的参数化方法是利用卷积神经网络(convolutional neural networks,CNN)、生成对抗网络(generative adversarial network,GAN)和深度神经网络(deep neural networks,DNN)等架构,将复杂的几何模型转化到一个特殊的潜空间中,然后通过人工智能强大的学习能力来解析模型在潜空间中具有的低维流形特征,实现几何模型的局部定向控制,同时,还可通过数据库学习获取一种符合设计准则的最佳方案。
2.1.2 代理模型预测技术
系统性能预报是AUV总体设计的重要环节,决定着AUV总体设计的成效。随着计算机性能的提高,高精度仿真分析可以代替真实的试验来预报AUV的性能,但同时也会产生巨大的计算代价。采用代理模型预测技术,可以利用已有数据建立代理模型来近似高精度的仿真计算,能在满足计算精度的同时降低计算量。常用的代理模型包括径向基函数(radial basis function,RBF)模型、Kriging模型等。
在AUV单学科设计优化中,代理模型技术已得到广泛应用,如水动力外形设计优化、螺旋桨设计优化等。然而,AUV的总体优化属系统级的多学科优化问题,存在变量空间维度高、非线性强等特点,致使利用代理模型预测AUV的系统性能面临着挑战。
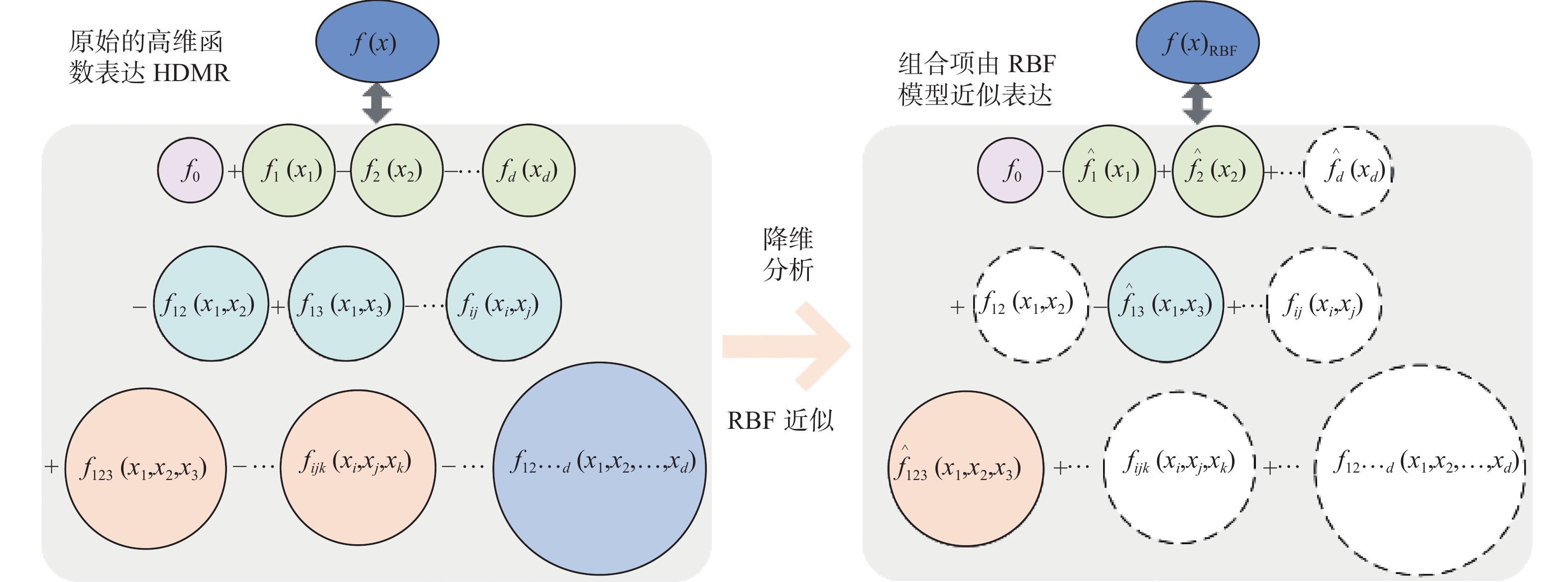
如何提高系统性能预报的精度是AUV总体设计需要发展的关键技术。针对AUV总体设计问题的高维、非线性特点,可以开展高维代理模型研究,即利用降维方法实现高维空间至低维空间的映射,降低高维建模难度,提升代理模型的高维表征能力。例如,现有的HDMR-RBF(high-dimensional model representation-RBF)方法(图15)[12]就是将高维目标函数
f(x) 展开为多个独立的子项,通过逐项构建RBF代理模型来实现高维问题的有效处理;高维Kriging方法[13]利用主成分分析法减少超参数的个数,增强了Kriging的高维适用性。针对AUV总体设计中存在的多保真度信息,可以开展多保真度建模研究[14-15],以最大程度地挖掘样本数据信息,提高多保真度模型的精度及泛化能力。例如,分层Kriging方法通过对全局趋势模型引入低可信度分析的影响,实现了变可信度代理模型的构建。![]() 图 15 高维代理模型预测技术HDMR-RBF方法Figure 15. HDMR-RBF method of high-dimensional surrogate model prediction technology
图 15 高维代理模型预测技术HDMR-RBF方法Figure 15. HDMR-RBF method of high-dimensional surrogate model prediction technology2.1.3 数据驱动的多学科优化设计技术
国内外已经开展了基于经验公式快速预报系统性能的回转体AUV多学科优化设计工作[16-18]。但随着AUV尺寸与约束的放开,其形态更加多样化,总体性能评估愈加困难,需要进行子学科之间的协同仿真,如外形计算流体力学(computational fluid dynamics,CFD)仿真、结构有限元法仿真等,带来了昂贵的计算代价。
针对该问题,通常的做法是构造静态代理模型以替代原仿真来开展多学科优化设计。但是由于代理模型不再更新,其预测精度非常依赖初始样本,故难以获得真实的最优解。同时,对于新概念AUV,其总体设计常具有变量空间维度高、变量类型不同(离散变量、连续变量)、目标或约束条件复杂等特点。如果直接对总体系统的目标或约束函数构造代理模型,其预测精度将会进一步下降。此外,在进行多学科协同仿真时,因各子学科的仿真模型不同,数据类型不一,目标或约束仿真耗时程度存在差异,导致系统性能评估存在并行资源浪费、信息交换与数据管理困难等问题。
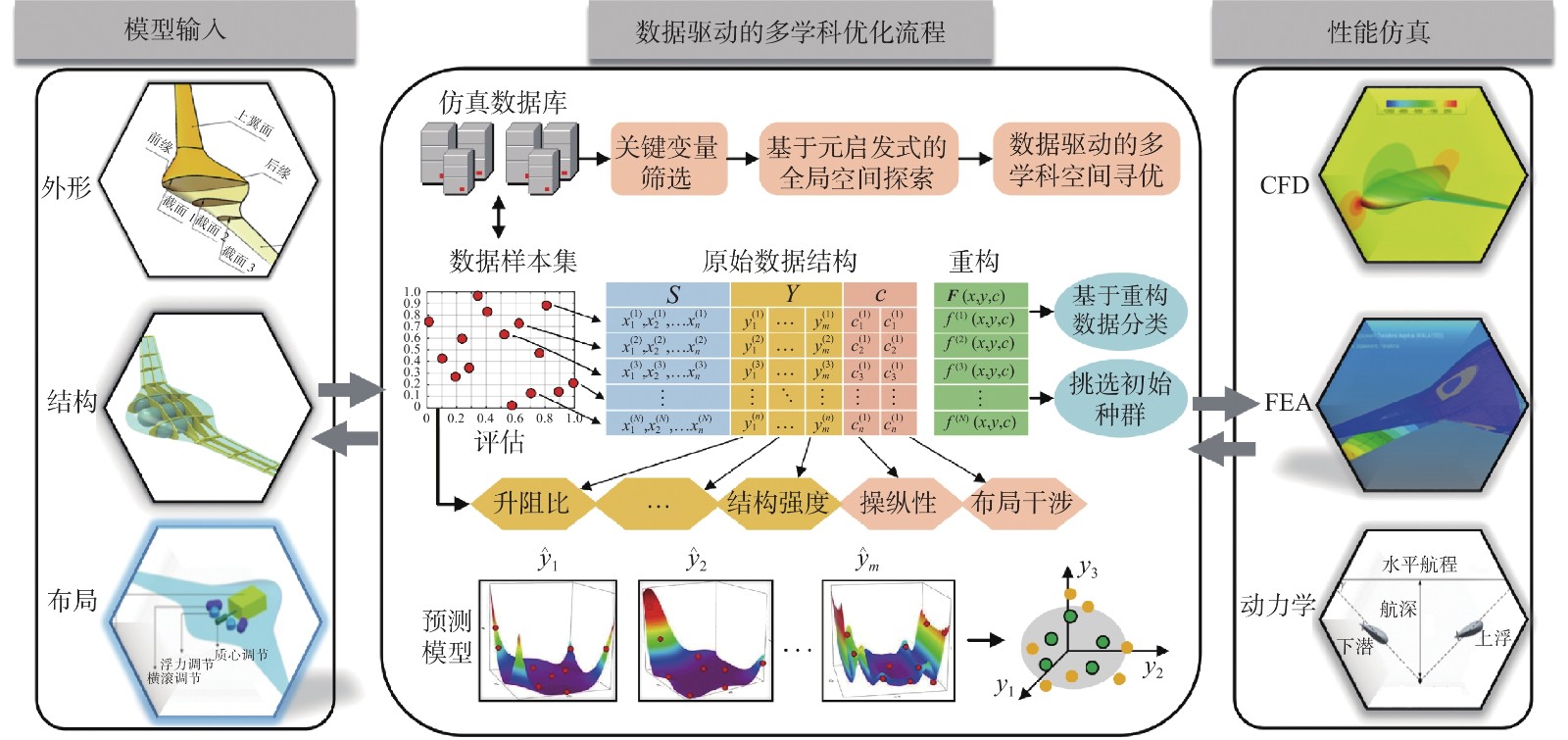
因此,需要发展数据驱动的多学科优化设计技术,即利用已有样本数据构建面向复杂系统的代理模型,探索和挖掘有用信息,动态更新代理模型以提高预测精度,不断迭代优化获得系统最优解。同时,多学科优化设计需采用并行实施框架,以合理地开展计算资源分配,促进系统仿真的并行实施,科学管理仿真数据,从而缩短设计优化周期,加速总体设计进度。如图16所示,数据驱动的翼身融合了水下滑翔机多学科优化设计,通过建立多学科参数化模型,开展CFD、有限元分析(finite element analysis,FEA)、动力学等仿真分析,实现给定样本输入
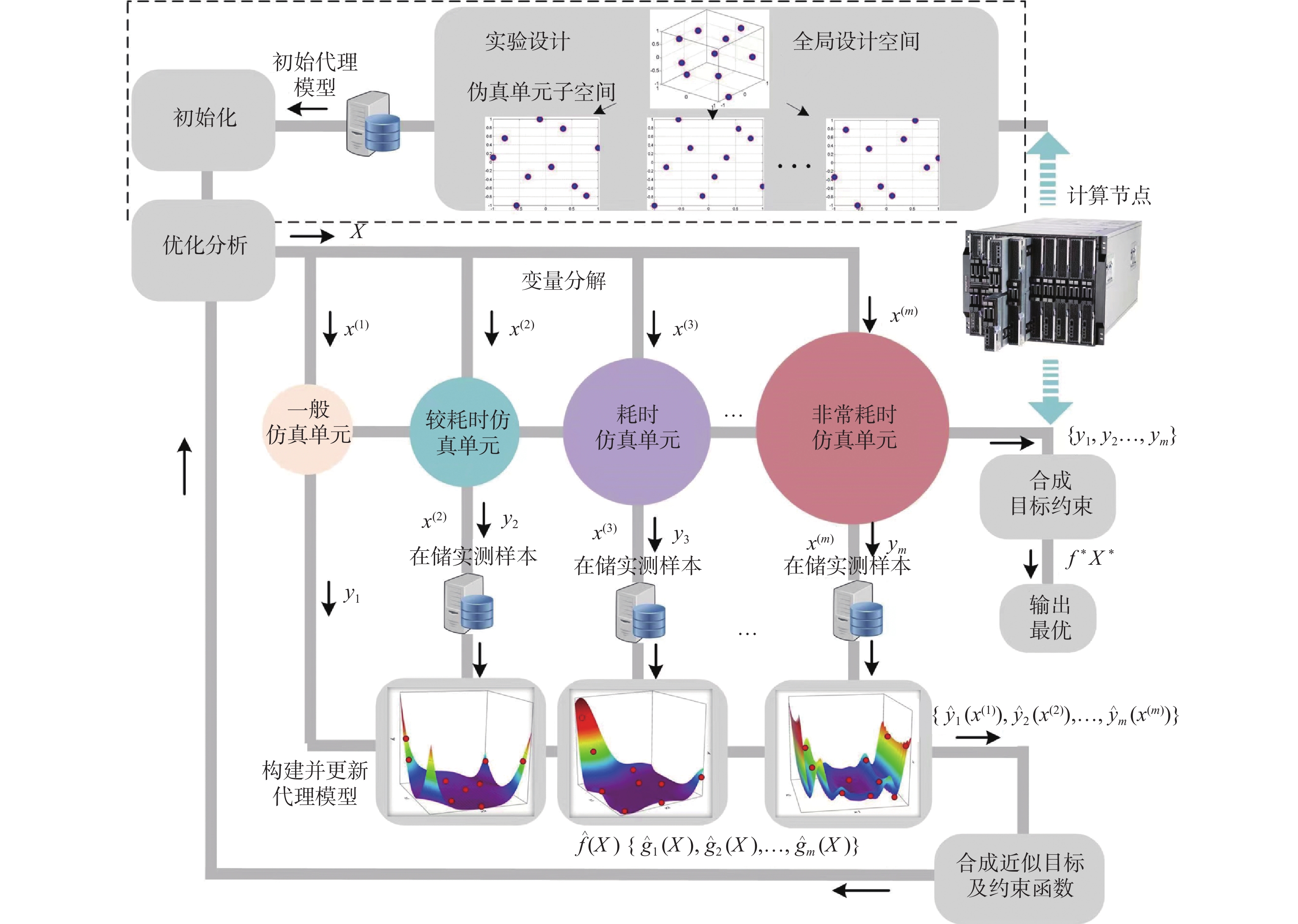
{{{{\boldsymbol{S}}}}_i} = (x_1^{(i)},x_2^{(i)},...,x_n^{(i)}) 后,得到了对应的升阻比、结构强度等优化目标{{{{\boldsymbol{Y}}}}_i} = (y_1^{(i)},y_2^{(i)},...,y_m^{(i)}) 及操纵性、布局干涉等约束{{{{\boldsymbol{c}}}}_i} = (c_1^{(i)},c_2^{(i)},...,c_n^{(i)}) 的求解。经目标函数值、约束值重构后,不断进行优化迭代,实现了对多学科最优解的获取。具体地,对优化目标、约束的求解可以由图17所示的技术路线进行,通过对所需性能指标{y_m} 按仿真耗时度划分计算资源,可实现不同耗时单元的统一协调,从而进一步提高系统仿真速度,实现优化迭代效率的进一步提升。图中:f *为最优目标函数值;X *为最优设计变量值;\hat y_i 为合成第i个仿真单元对应的预测目标函数值;\hat f(X) 为预测目标函数值;\hat g_i 为合成第i个仿真单元对应的预测约束函数值;F为重构矩阵。![]() 图 16 数据驱动的多学科优化设计:以翼身融合水下滑翔机为例Figure 16. Data-driven multidisciplinary optimization design: a case study of a wing-body fusion underwater glider
图 16 数据驱动的多学科优化设计:以翼身融合水下滑翔机为例Figure 16. Data-driven multidisciplinary optimization design: a case study of a wing-body fusion underwater glider![]() 图 17 耗时仿真系统优化流程示意图Figure 17. Schematic diagram of optimization process of time-consuming simulation system
图 17 耗时仿真系统优化流程示意图Figure 17. Schematic diagram of optimization process of time-consuming simulation system2.2 AUV结构与材料设计技术
AUV结构是总体的一个重要组成部分,其功能是把AUV上的各系统组成一个有机的整体,为各系统提供安全、可靠的工作环境,为航行器内部各设备提供安装空间并承受外部环境载荷,以保证航行器的完整性和有效性,并满足总体性能要求。AUV的结构形式可以分为整体耐压结构、透水式框架结构、整体耐压舱和透水式框架复合结构。其中,透水式框架结构不承受静水压力,主要由外部蒙皮、内部框架、浮力材料等组成,其耐压壳体被包围在透水式框架内部。AUV的材料、结构设计及制造技术对于保障AUV的安全和可靠至关重要。AUV在水下工作时,其结构需要承受巨大的静水压力(与工作深度成正比),在静水压力载荷下,AUV的结构会发生变形,若结构不合理,可能会造成AUV结构发生稳定性失效(屈曲)、强度失效、或因变形过大导致的密封失效。AUV结构是其核心设备的保护体,一旦结构出现失效,出现舱室进水,将会导致其内部的电子仪器、电池、设备等短路失控,甚至是发生AUV沉底丢失的严重事故。因此,AUV的材料、结构设计及制造技术对于AUV安全可靠工作十分关键。随着当前AUV向大潜深、长航程和大负载方向发展,AUV结构的关键技术包括结构轻量化设计技术、结构多目标优化设计技术、新材料结构加工工艺技术等。
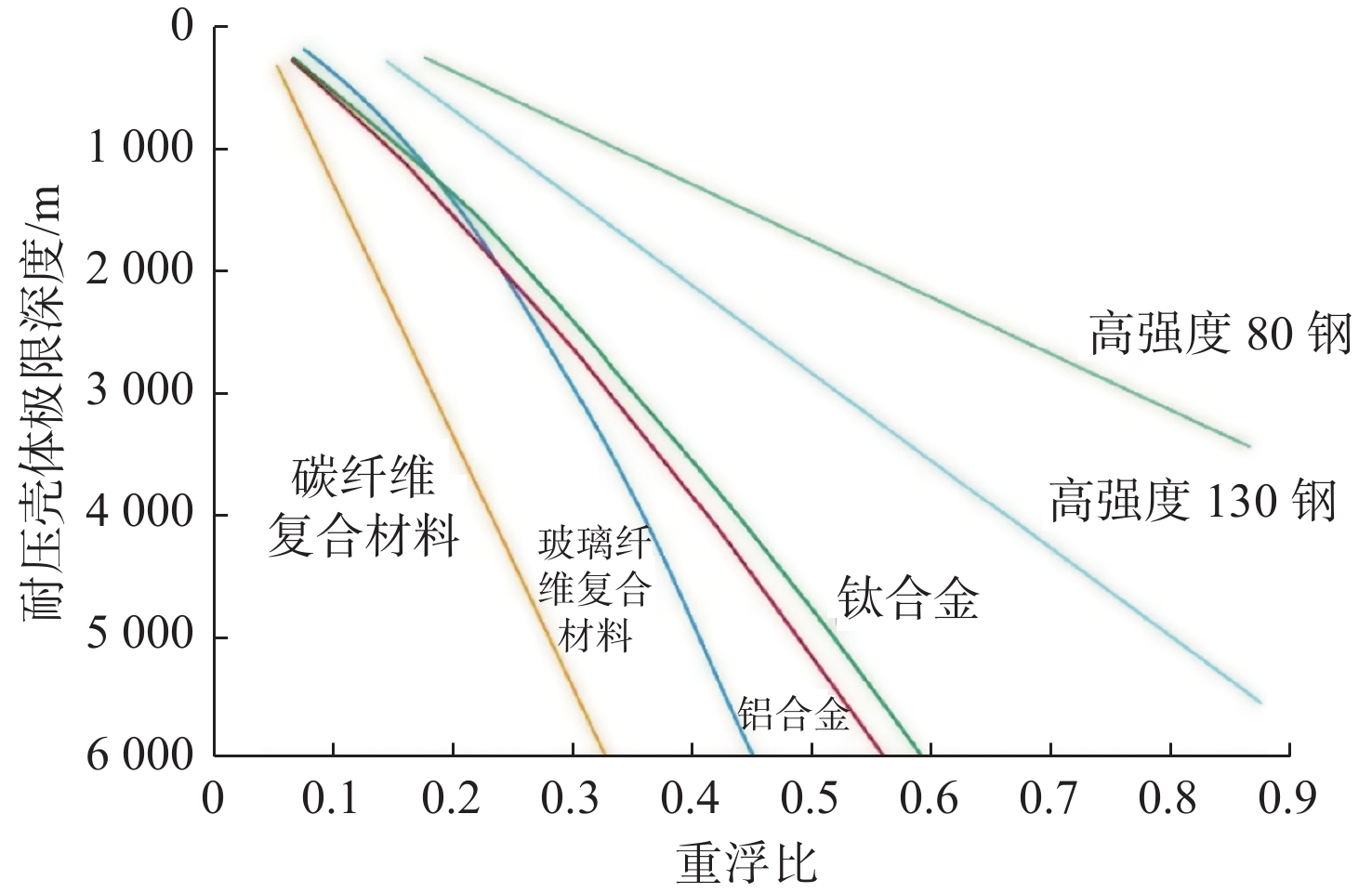
AUV耐压结构的设计首先是材料的选择。可用的AUV壳体材料包括高强度钢、铝合金、钛合金以及新型复合材料(如碳纤维复合材料、玻璃纤维复合材料、陶瓷基复合材料等)。如何在给定的工作深度下选择合适的轻质、高强、耐腐蚀材料设计出重量轻、承载力大、安全可靠性高的AUV壳体结构是当前的难点。图18示出了不同材料制成的AUV壳体结构极限工作深度与重浮比(AUV壳体重量与其排开水的重量之比)的关系曲线。从中可见,当工作深度大于1 000 m时,采用碳纤维复合材料制成的AUV的壳体结构具有最小的重浮比,但该材料的结构失效形式复杂,如何根据给定的尺度确定铺层角度、铺层顺序、铺层数、肋骨间距、肋骨截面、肋骨参数等,以使AUV壳体结构稳定性失效压力与各个方向强度失效压力的最小值最大是设计的难题。Zhang等[19-21]针对碳纤维复合材料的AUV壳体进行研究,提出了复合材料壳体结构的稳定性失效和强度失效竞争机制,并采用多目标优化算法优化了加肋复合材料壳体,结果表明,相比铝合金和钛合金材料,在同等条件下使用碳纤维复合材料能够减重30%~45%,并已通过试验验证。
![]() 图 18 耐压壳体极限深度与重浮比关系Figure 18. The relationship between the ultimate depth of the pressure shell and the re-float ratio
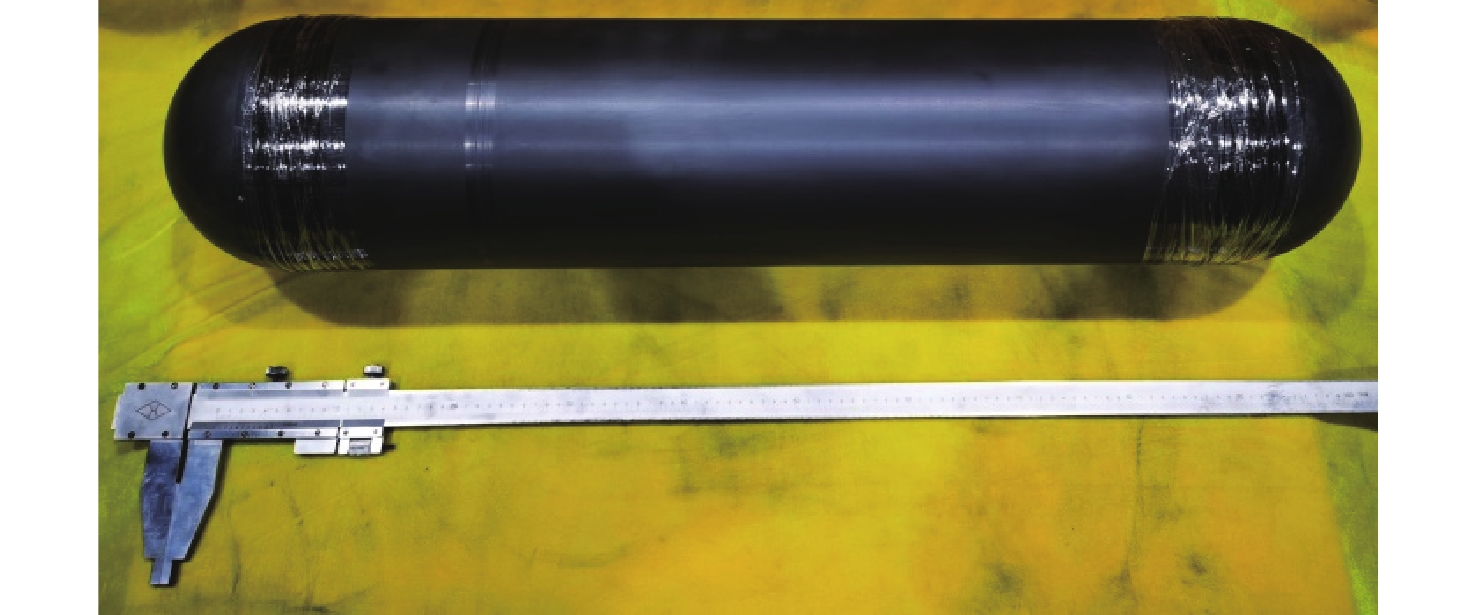
图 18 耐压壳体极限深度与重浮比关系Figure 18. The relationship between the ultimate depth of the pressure shell and the re-float ratio陶瓷复合材料的密度虽然不是最小(3.2~3.4 g/cm3),但由于其具有非常高的压缩模量和压缩强度(图19),使得由其制成的AUV耐压壳体具有非常高的承压能力。从理论上讲,使用陶瓷复合材料制成的AUV其耐压结构具有更小的重浮比,但受目前工艺水平的限制,还无法用其制造出壁厚小于7 mm的性能稳定、安全可靠的AUV耐压结构。因此,在AUV工作水深较小时,陶瓷基复合材料的优势并不明显,但在超深水(水深大于6 000 m)条件下,使用陶瓷基复合材料制备的AUV耐压壳体具有非常明显的优势。2020年,西北工业大学联合中科院上海硅酸盐研究所解决了陶瓷基复合材料与钛合金连接环的连接问题,并研制出了可下潜至6 000 m水深的AUV陶瓷耐压壳体(图20),其直径为200 mm,壁厚仅8 mm,承压性能大于80 MPa,并已通过试验验证。
![]() 图 19 陶瓷复合材料与金属材料参数对比Figure 19. Comparison of parameters between ceramic composites and metal materials
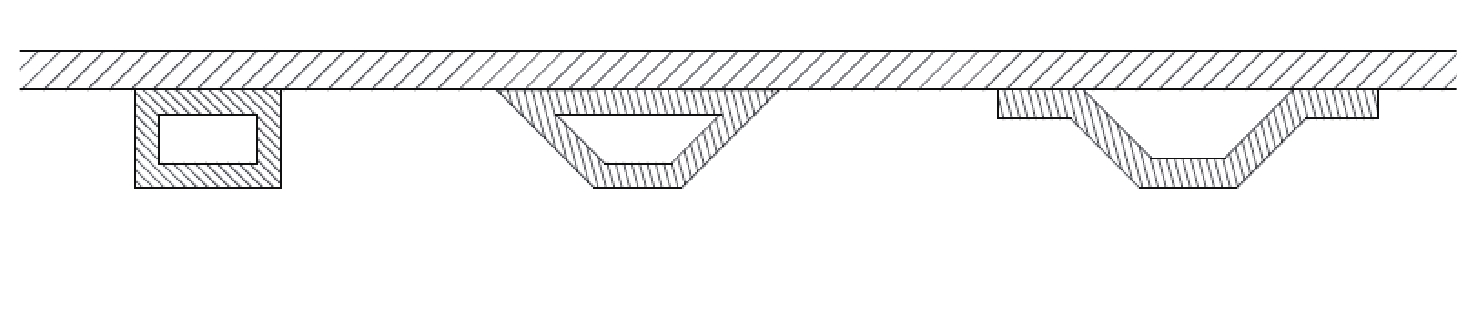
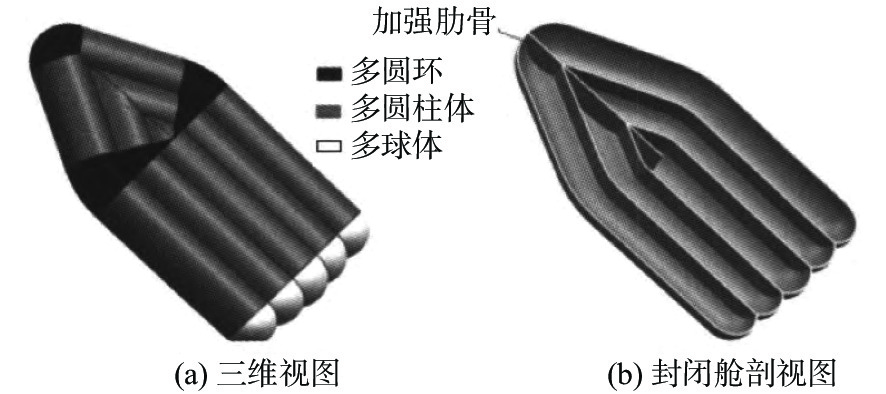
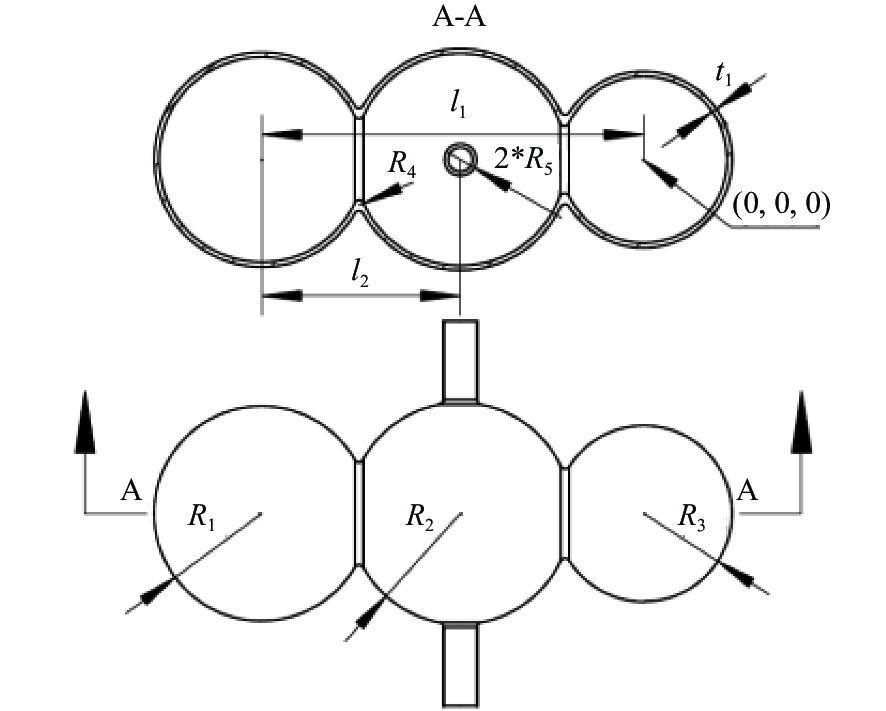
图 19 陶瓷复合材料与金属材料参数对比Figure 19. Comparison of parameters between ceramic composites and metal materials近年来,在AUV壳体结构形式方面,有研究人员提出了一些新概念的结构,对于AUV结构的轻量化和提高AUV的负载具有重要的指导意义。Rahimi等[21]提出了“格栅+中空加肋”的结构形式(图21),该结构能显著减轻壳体结构重量并具有较好的承载能力。何衍儒和宋保维等[22]针对翼身融合水下航行器提出了一种多泡耐压壳体结构形式,并对其进行了优化设计,如图22所示。伍莉等[23]和宋保维等[24]针对大潜深AUV提出了藕节形耐压壳体的概念设计,如图23所示。图中:3个相互藕节的球壳半径分别为R1,R2和R3,壁厚均为t1;R4为与中间球壳连接处圆角半径;R5为贯穿中间球壳的圆柱壳体半径;l1为球壳1与球壳3球心之间的距离;l2为球壳1与球壳2球心之间的距离。
未来,在AUV结构方面,新型复合材料(碳纤维复合材料、玻璃纤维复合材料、陶瓷基复合材料)结构的设计和制造、新概念AUV的结构形式及应用将是AUV耐压结构材料的发展趋势。
2.3 AUV动力与推进技术
动力推进系统是AUV的“心脏”,通常由能源、电机/发动机、推进器等部件组成。当前,AUV的动力推进系统主要是以电动力为主,通过电池驱动电机来为AUV航行提供动力。为适应深远海的应用需求,AUV正朝着远航程、大潜深、低噪音的方向发展,因此,提升能量密度、克服海水背压、拓宽航速范围、改善航行噪音等成为AUV动力推进技术的发展方向。
2.3.1 AUV能源供给与管控技术
目前,AUV的能源主要以锂电池为主,需要提升AUV锂电池的设计及管控技术。在电池本体设计方面,针对大潜深环境下的承压电池应用,因高静水压而导致其性能劣化的内在机理研究尚处于初期阶段,因而需采用多种先进的微观表征技术手段予以明晰。在电池成组设计方面,发展集承载−散热−供能于一体的动力舱段设计方法,对提升航行器的航程和安全具有重要意义。在电池组安全管控方面,通过电池组高精度状态监测与故障诊断、电路均衡与拓扑重构等技术来提高电池组的使用安全性与可靠性。
为提高AUV的续航能力,基于燃料电池−锂离子电池的混合能源技术是当前研究的热点。混合能源系统兼顾了燃料电池的高能量密度和锂离子电池的高放电功率,但因系统存在强非线性特性,需要建立完善的混合系统动态调控模型,从而提高混合动力控制技术的收敛性与鲁棒性。此外,水下无线充电技术是提高AUV续航能力的另一项新兴技术,AUV按需自主返回水下基站进行电能补充和数据交换,可以极大地拓展续航能力(图24)。目前,水下无线充电功率和效率已能够满足小型AUV的能源补给需求,未来,需重点解决海洋环境适应性、电磁兼容性等工程应用问题。
![]() 图 24 西北工业大学研制的水下非接触式充电装置(回转体式和开架式)Figure 24. underwater non-contact charging device developmentde by Northwestern Polytechnical University (rotary body type and open frame type)
图 24 西北工业大学研制的水下非接触式充电装置(回转体式和开架式)Figure 24. underwater non-contact charging device developmentde by Northwestern Polytechnical University (rotary body type and open frame type)2.3.2 高比特性推进电机技术
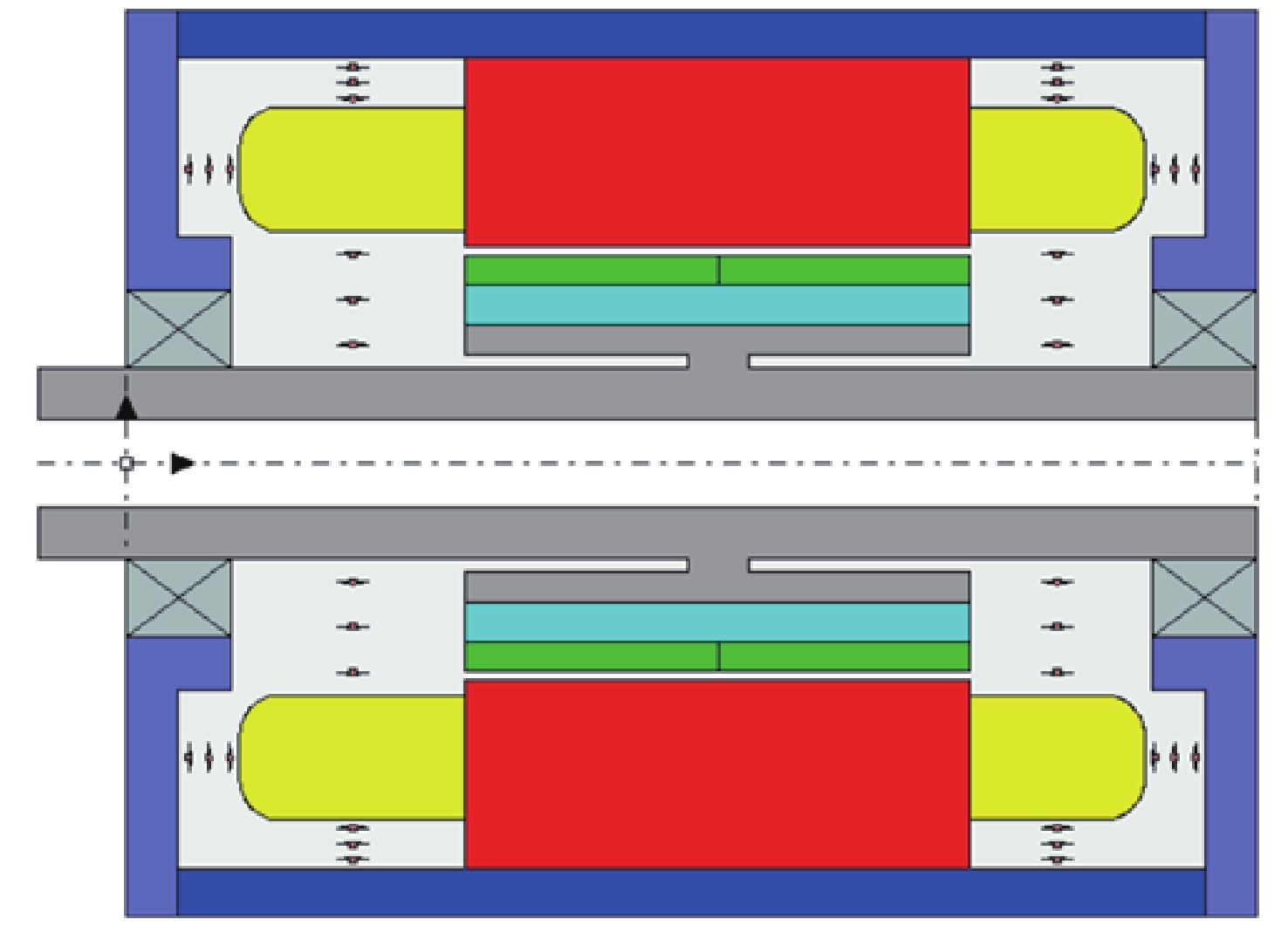
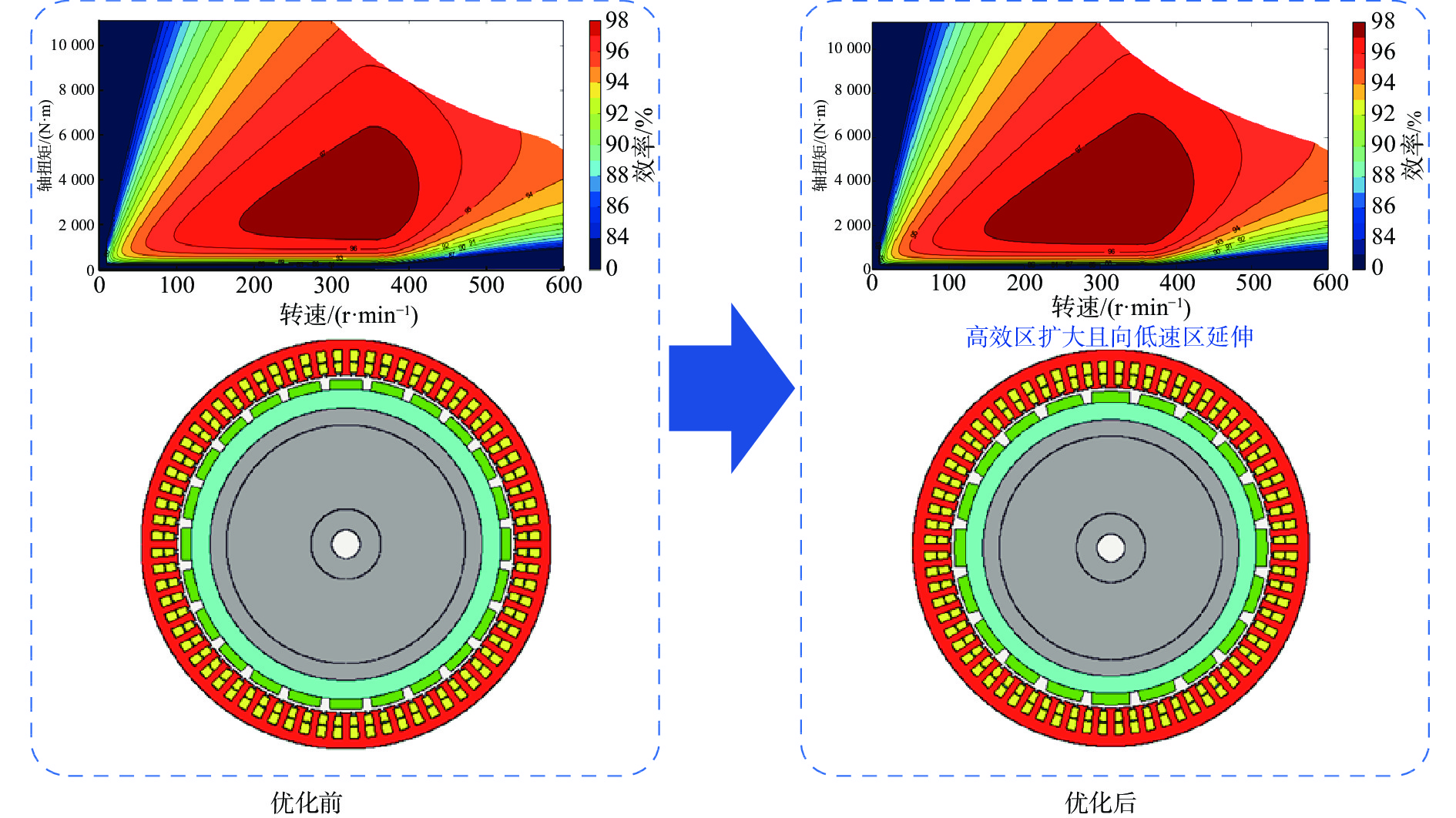
AUV推进电机面临着空间密闭受限以及多速制机动的严苛使用环境,对功率密度和高效率范围有着较高的要求。在高功率密度推进电机技术方面,采用分数槽集中绕组或发卡式扁线绕组,通过结合磁路优化设计,可减小耗材,提高功率密度和材料利用率。为进一步提高水下推进电机的功率密度,需重点解决散热问题,喷油、甩油等油冷技术是较为先进的直接冷却技术,如图25所示。然而,考虑到AUV壳外即为海水,可开发更加简单、高效的间接冷却技术,如机壳水冷、海水冷却等,以满足电机高功率密度的散热需求。在扩大推进电机高效率范围技术方面,采用优选极槽配比、优化电枢绕组、合理设计磁路结构等方法,可扩大电机高效率区间并向特定工作点移动,如图26所示,从而使水下推进电机在高、低功率状态下均具备较高的效率。
![]() 图 26 大功率跨度推进电机效率优化效果对比Figure 26. Efficiency optimization effect comparison of large power span propulsion motors
图 26 大功率跨度推进电机效率优化效果对比Figure 26. Efficiency optimization effect comparison of large power span propulsion motors2.3.3 低噪声高机动推进器设计技术
推进器是实现AUV高效机动航行的重要部件,也是AUV自噪声的主要来源之一。为了提高AUV的机动性和噪声特性,国内外在新型推进方式和推进器优化两方面开展了大量工作,包括泵喷推进、滑翔推进和仿生推进等。泵喷推进是通过将泵喷推进的转子置于导管内,以延迟并减少空化的产生,改善推进器噪声性能,而无轴泵喷推进由于能够更加有效地降低空泡噪声和气蚀的影响,成为泵喷推进的重要研究方向[25]。滑翔推进以水下滑翔机为代表,其工作原理是将水翼所产生的升力转化为推动其向前的动力,并由其内部调节装置来调整运动姿态,相比螺旋桨,滑翔推进的噪声得以大幅减小[26]。仿生推进是使用传统的机械结构或者智能材料来模拟海洋生物的游动,通过协同推进、柔性推进来使其具备高机动、低噪声的优势,从而更好地完成探测任务。西北工业大学自主研发的仿蝠鲼潜水器由于其低噪隐蔽的特性,能够在海洋牧场中和鱼群混游,监视海洋牧场鱼群的健康状态[27]。
AUV的动力与推进技术的发展需紧密结合平台的功能需求,低噪声和高机动性仍是其发展的长期趋势。同时,还应关注人工智能技术的应用,基于实时状态监测与智能管控手段,实现动力与推进系统的组部件协调、配合和智能化调度,这有利于提升AUV的整体静谧性和机动性水平。在能源技术方面,耐压电池、混合能源、无线充电等技术已得到初步发展,未来,需重点解决使用安全性和环境适应性的问题,基于环境能源的发电技术也是一个重要的发展方向。在电机技术方面,结合近年来在增材制造技术方面的突破,有望通过增材制造技术实现航行器动力推进舱段的一体化加工,从而进一步提升能量密度和功率密度。在推进器设计方面,仿生推进具有高机动、低噪声的优势,需重点突破仿生推进流动控制机理、高效推进控制、群游节能机制等关键技术。
2.4 AUV导航与定位技术
导航与定位系统是AUV的“眼睛”,可为AUV提供准确的位置、速度和姿态信息,是决定AUV是否到达预定地点、是否成功完成任务并返航的关键,同时,也是AUV 开展水下探测、海域搜索、海底绘图、协同反潜等任务的基础。为适应深远海应用的需求,AUV导航与定位系统正朝着无人自主导航、长航时可靠工作、高精度定位、实时准确提供导航信息、小体积和低功耗等方面发展。
2.4.1 地球物理场导航技术
目前,通用的地球物理场导航技术主要包括地形匹配导航、地磁辅助导航和重力辅助导航3类。其中,地形匹配导航是指通过比较地形参考数据库和地形高度测量值来确定载体位置的特征匹配导航技术,是一种自主性强、连续性强、隐蔽性好的水下导航方法[28]。海底地形辅助导航(seabed terrain aided navigation,STAN)技术主要用于水下导航定位,其利用水下地形传感器测得的水下地形数据,同水下地形数字海图数据库进行匹配,然后通过计算机处理数据而得出潜航器所在位置。该技术通常用于辅助惯性导航系统[29]。从理论上来说,该方法对AUV的航行时间和航行路径没有要求,可以保证AUV在水下长时间工作后仍能准确到达目标任务点进行作业任务,保证了定位的准确性。但是,这种导航技术会随着时间的积累而产生较大的累计误差。
海洋地磁辅助导航与地形匹配导航类似,也是采用预先获取高精度地磁数据库的方法。首先,地磁匹配预先将选定海域地磁场的某种特征值制成参考图并储存在水下航行器的计算机中,当航行器经过这些海域时,体载传感器实时测定地磁场的有关特征值以构成实时图,并实时输出位置信息;随后,将预先存储在水下航行器中的参考地磁图与实时图进行对比,得到当前位置的地磁参考值;最后,将实时图与预存的参考图在计算机中进行相关匹配,确定出实时图在参考图中的最相似点,也即匹配点,从而计算出航行器的精确实时位置,达到精确导航的目的[30]。目前,我国对于地磁辅助导航的研究仍处于半实物仿真阶段,大部分是完成水下探测任务。例如,我国研制的“蛟龙”水下航行器的潜深为4 500 m,搭载有水下地磁探测器,可用于海底磁测分析[31]。
重力辅助导航是一种利用重力敏感仪表的测量来实现的图形跟踪导航技术。它是把事先做好的重力分布图存储在导航系统中,然后再利用重力敏感仪器测定重力场的特性以搜索期望的路线,最后,通过人工神经网络和统计特性曲线识别法使运载体确认、跟踪或横过路线,从而到达某个目的点[32]。重力辅助导航具有定位精度高、不受地域和时间限制、隐蔽性好等优势,但重力仪等传感器的质量和体积均较大,无法安装在水下航行器上。未来,可以考虑朝着轻量化、小型化的方向发展。
但是,地球物理场导航技术是以地球本身的物理特征进行导航的技术,需要提前收集采集地球的导航信息,并建立相应的导航信息库。而且,传统的地球物理场导航技术存在误差大、计算难度大等问题。现阶段,水下无人航行器普遍采用捷联惯性导航系统(strap-down inertial navigation system,SINS)、捷联惯性导航系统/多普勒计程仪(SINS/DVL)自主组合导航,以及声学导航(即长基线(LBL)/短基线(SBL)/超短基线(USBL))等导航与定位技术。
2.4.2 组合导航技术
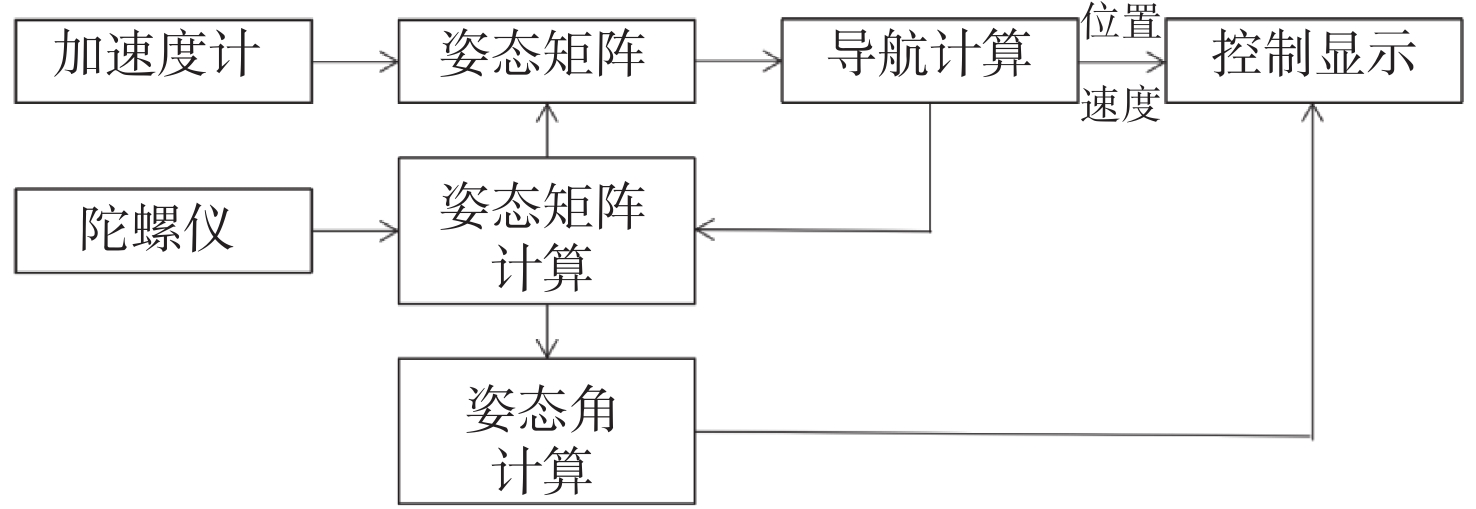
SINS是通过计算机模拟“数字平台”来代替实物完成工作,即将惯性测量组件(inertial measurement unit,IMU)直接“捆绑”在载体上,通过陀螺仪与加速度计直接捕获载体的运动信息来实现水下导航与定位,如图27所示。SINS具有自主导航能力,不需要任何外界电磁信号就可以独立计算出载体的姿态、速度和位置信息,其抗外界干扰能力强,可以极大地提高水下航行器的性能和可靠性。并且,系统的初始对准快捷且方便。但是,SINS的定位误差会随着时间的延续不断增大,即误差积累、漂移增大[33]。
![]() 图 27 捷联惯性导航系统原理图Figure 27. Schematic diagram of strap-down inertial navigation system
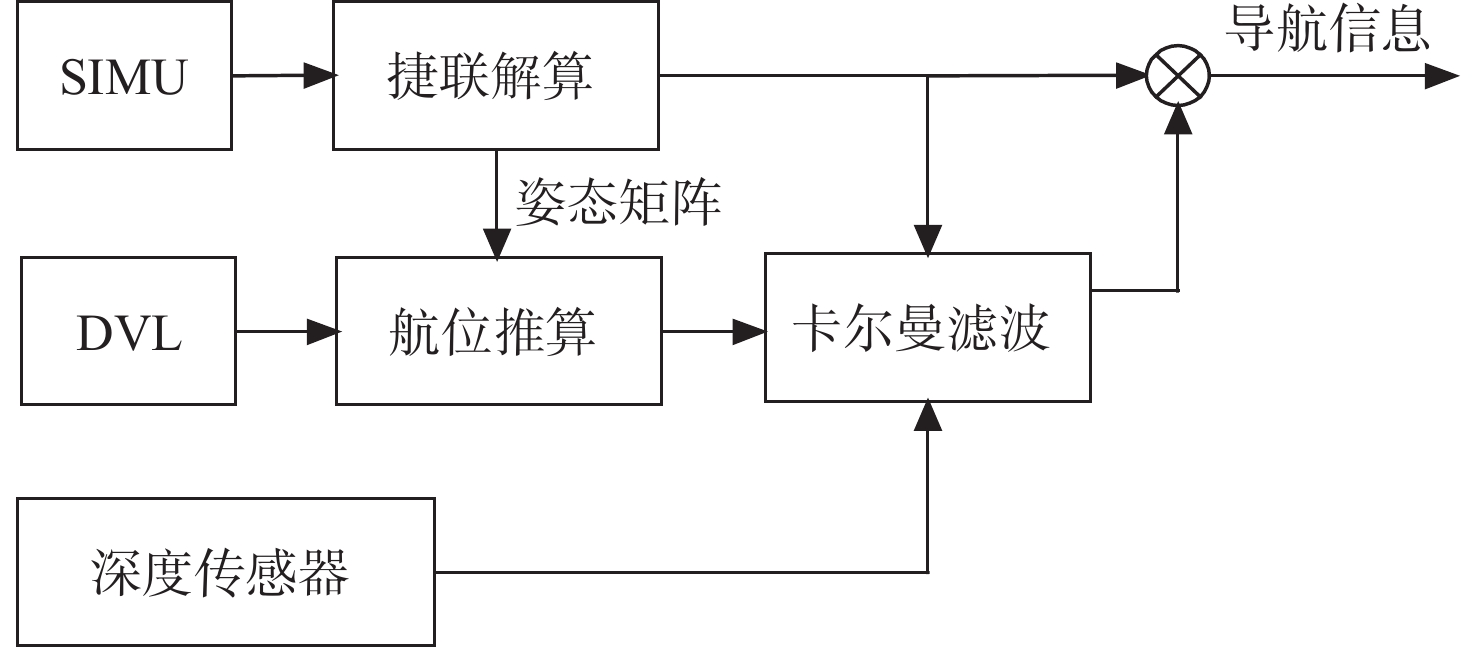
图 27 捷联惯性导航系统原理图Figure 27. Schematic diagram of strap-down inertial navigation systemSINS/DVL自主组合导航由捷联惯性测量组件(strap-down inertial measurement unit,SIMU)可单独构成捷联惯性导航系统,利用SIMU中的姿态矩阵与水下航行器上的DVL构成航位推算系统,再利用这2个子导航系统一起组成组合导航系统,其结构框图如图28所示。DVL是用于测量水下航行器航行速度的仪器,其不能单独用于确定位置,但是可以从惯性导航系统中获得的方位信息进行航位推算,组成航位推算(dead reckoning,DR)系统。SINS/DVL组合导航系统的高度定位误差是发散的,因此,有必要借助深度传感器的阻尼作用,提高系统高度通道的定位精度[34]。
![]() 图 28 SINS/DVL组合导航系统原理图Figure 28. Schematic diagram of SINS/DVL integrated navigation system
图 28 SINS/DVL组合导航系统原理图Figure 28. Schematic diagram of SINS/DVL integrated navigation system声学导航解决了因电磁波在水下衰减很快而导致传播距离短、无法长期潜伏在水下作业的问题,其原理是:通过计算 AUV 与声标之间声波信号的传输时间以及其相位差,确定 AUV 与声标之间的相对位置,然后,通过坐标转换得到 AUV 在大地坐标系上的位置信息。声学导航大致可以分为 3 类:LBL,SBL和USBL,具体采用哪一类取决于基线的长度、基阵的数量和布置位置,如表3所示[35]。
表 3 水声定位系统分类Table 3. Classification of hydroacoustic positioning systems定位类型 基线长度/m LBL 100~600 SBL 1~50 USBL <1 2.4.3 协同导航
单一的AUV往往不具备单独完成水下多任务的能力,而多个水下航行器的协同工作则可带来1+1>2的效果[36]。在多AUV协同导航中,需要对每个AUV进行定位。作为导航领域最具研究前途的方向之一,协同导航在无线电网络、卫星导航、无人车、水下无人航行器等方面越来越受到人们的关注。将协同导航方法应用于AUV可以凸显水下导航的定位优势。一般来说,协同导航可以分为主从式和并行式2种。在主从式协同导航中,主AUV配备定位精度高的导航设备,从AUV则配定位精度相对较低的导航设备[36]。在并行式协同导航中,各AUV搭配导航精度相同的设备,并行式中各AUV的导航精度一致。目前,主要研究的还是主从式协同导航,在概念上需要领航AUV装备高精度的自主定位系统(如惯性导航系统),跟从的AUV装备低精度的定位系统,这样不仅可以降低AUV的制造成本,而且在执行任务时只需对领航AUV实现精准定位,然后通过水声测距和水声通信系统推算出其他同伴的位置信息与姿态信息即可。这与单一AUV导航相比,在节约成本及简化设备复杂度的前提下,还极大地提高了定位精度。
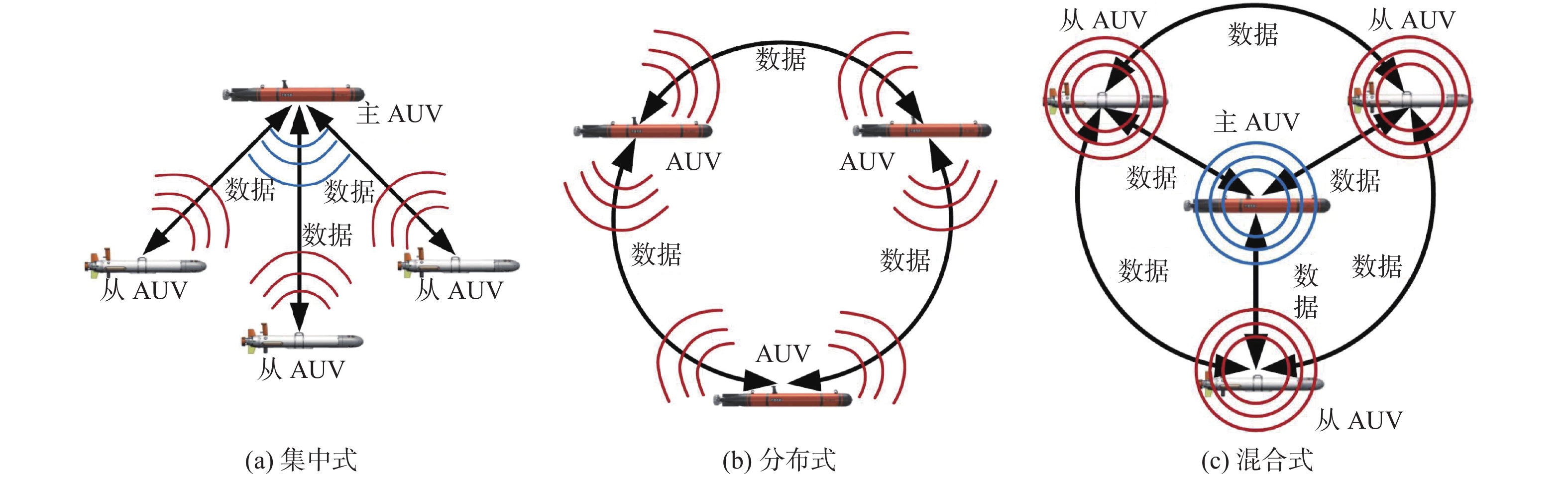
根据协调方式的不同,多AUV协同导航可以分为集中式、分布式和混合式3种,如图29所示。在集中式协同导航过程中,是先将从AUV的位置信息和主从AUV之间的距离信息传输到主AUV中,由主AUV进行滤波处理,然后再把解算后的位置信息广播到各AUV中[37]。在分布式协同导航过程中,滤波中心分散在各自的导航算法中[38]。在混合式协同导航过程中,滤波中心在各AUV上,采用这种方式能有效利用临近AUV的信息,是一种最优的结构形式。
![]() 图 29 基于协调方式分类的导航方式图Figure 29. Navigation mode diagram based on coordination mode classification
图 29 基于协调方式分类的导航方式图Figure 29. Navigation mode diagram based on coordination mode classification2.5 AUV探测与通信技术
AUV具有造价低、隐蔽性强、值守区域广、机动灵活、无需人工干预等优势,可自主、长时游弋于水下。为了自主完成各类水下任务,对AUV智能化的要求越来越高,而AUV所携带的探测、通信载荷是其智能自主达成使命任务的关键设备。受AUV载荷空间重量的限制,探测通信系统的轻量化、一体化成为发展趋势,除此外,还需重点解决AUV平台运动带来的强多普勒、高背景噪声和由复杂海洋环境带来的信道时变等问题,特别是在无人集群应用场景下,如何克服平台和环境带来的影响,有效实现探测与通信也将面临巨大的挑战。
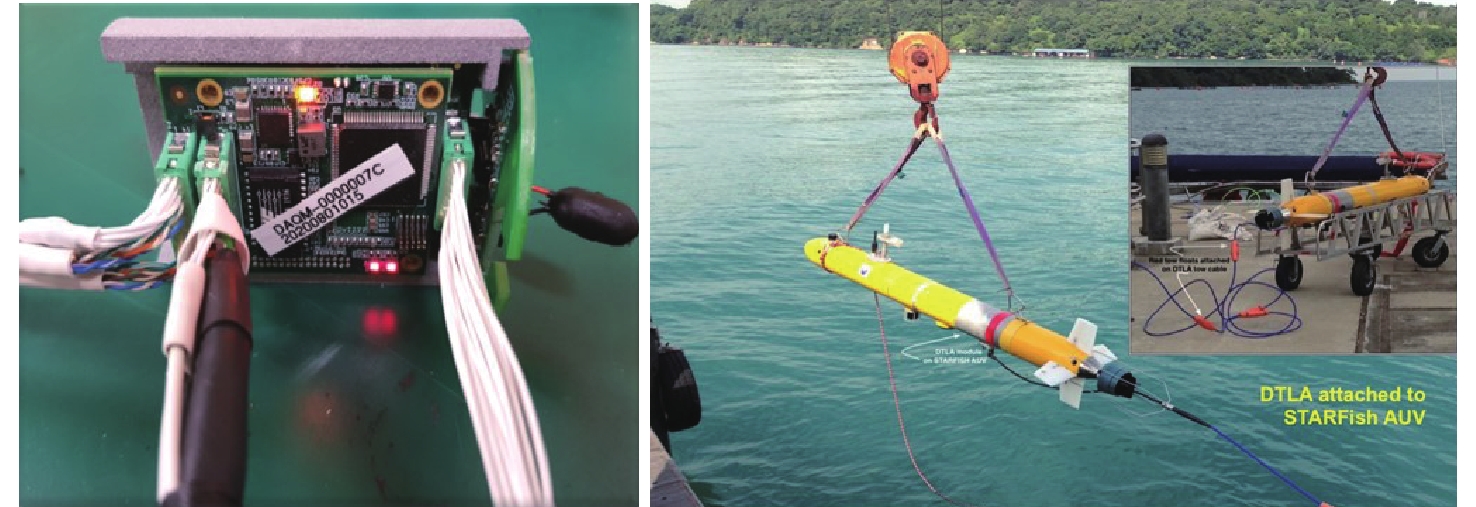
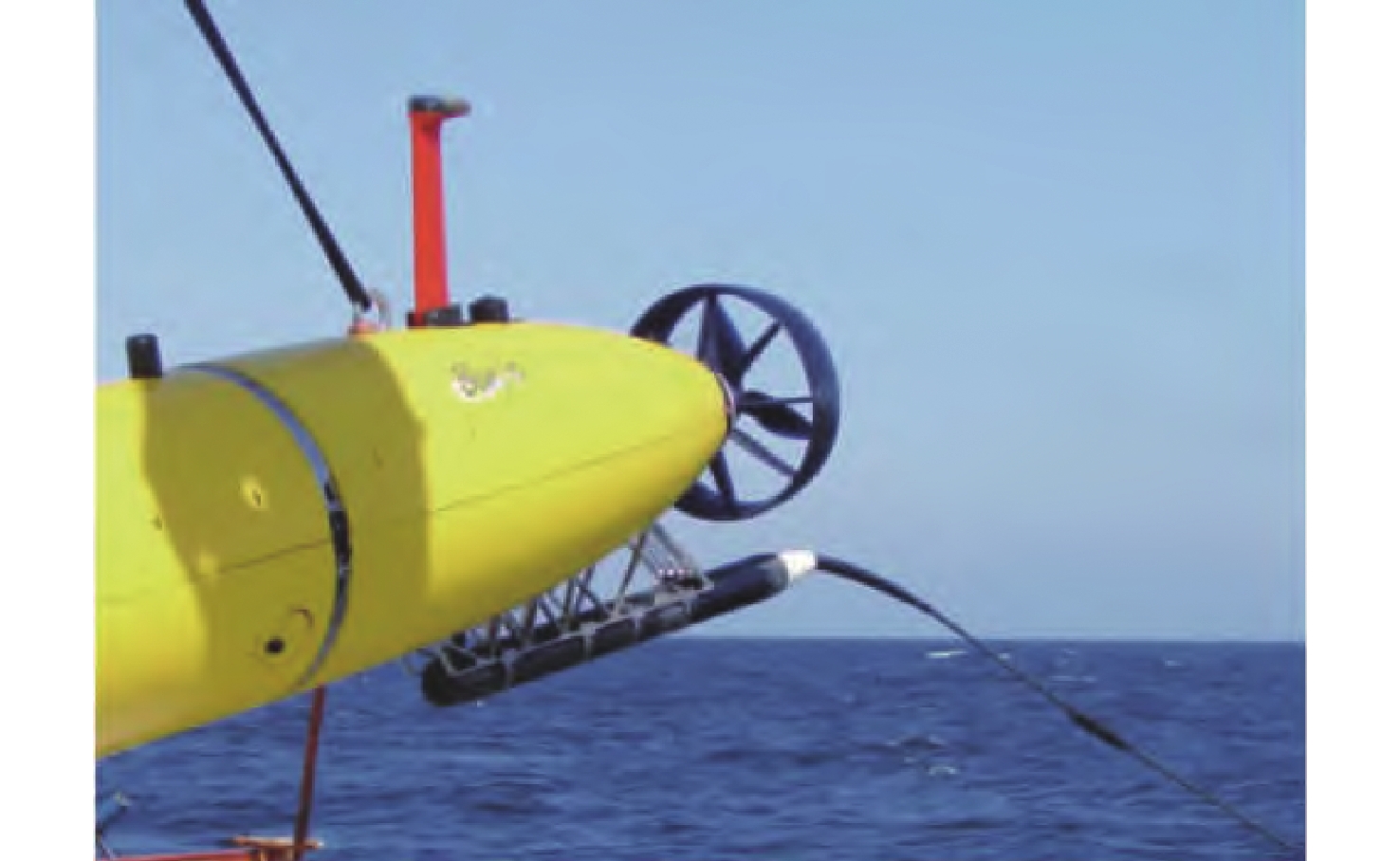
探测通信系统的轻量化一直是研究的热点和难点,近年来,主要突破点集中在实现电声、声电转换的换能器设备上。为了降低空间和重量,北约水下研究中心(NURC)、新加坡国立大学均致力于细线拖曳阵技术,后者自2005年起开始该技术的开发工作,已成功研制出直径为15~25 mm、阵元数为12~24的多型细线拖曳阵,并利用STARFish AUV搭载直径为15 mm的数字细线拖曳阵实现了自主探测[39],如图30所示。西北工业大学则利用直径为30 mm的32元光纤细线阵实现了对中型水面舰20 km范围的被动探测。相比标量声压水听器,矢量水听器具有与频率无关的偶极子指向性,可在各向同性噪声场中获得一定的空间增益,能够有效提升AUV在低信噪比环境下的目标探测能力,目前,已有多家研究机构在开展相关的研究工作。麻省理工大学、北约海事研究和实验中心(CMRE)、哈尔滨工程大学、海军潜艇学院等相关的国内外研究机构开展了利用矢量水听器对水下目标进行探测、定位与跟踪技术的研究和试验验证[40-43]。其中,麻省理工大学利用AUV搭载100 m长的矢量阵,开展了自主探测海上试验(图31)[40];海军潜艇学院通过在滑翔机头部搭载单矢量水听器,获得了对航速为10 kn的试验船探测范围大于14 km的探测指标[43]。
![]()
为进一步克服空间、重量等的限制,AUV探测系统开始向主被动联合、换能器轻量化、与声通信机等其他声载荷共用换能器及信号处理硬件的方向发展,即研制通信、探测、节点子定位为一体的综合声载荷,可有效缩小设备体积,降低AUV的能耗水平。
由AUV自身运动所带来的强多普勒、高背景噪声,以及因复杂的水声传播信道引起的多径衰落等不利因素,使得AUV通信与探测系统迫切需要具有环境适应能力。为适应运动条件下的稳健通信需求,AUV通信多采用商用声通机,在调制方式上以抗多普勒、抗噪声性能较好的扩频(直扩、扫扩)和多进制数字频率调制(multi frequency sift keying,MFSK)为主,结合多普勒补偿技术,有助于实现较高相对运动速度及加速度下的稳健通信。结合公开报道,目前商用声通机的系统性能上界已接近于40 km·kbit/s[44]。相关高校及科研院所近年来开展的正交频分复用(orthogonal frequency division multiplexing,OFDM)、正交时空频(orthogonal time frequency space,OTFS)、单载波水声通信以及水下光通信、磁通信等研究与试验验证为不同环境下稳健、高速、可靠通信链路的实现提供了可行的思路。
为了应对水下复杂甚至是恶劣的使用环境,以及具有对抗能力的非合作目标带来的巨大挑战,近年来,受益于人工智能等信息技术的长足发展,AUV的探测、通信能力也得到了有力的支撑。结合深度学习技术,在长时间、固定区域或节点下获得有效的环境信息进而获得环境的适应性以提升探测、通信系统性能已成为可能。
需要指出的是,随着集群化、体系化的发展,各AUV如何在受限的通信链路条件下实现协同探测,也是当前AUV需要迫切解决的问题。采用动态多基地技术,可以在不同任务模式下,在多个AUV之间切换主被动工作体制,应对目标大范围机动、目标对抗等情况。
总之,智能化、轻便化、自主化是未来AUV探测与通信的发展方向,必将随着高灵敏度轻型传感材料、高增益信息处理和人工智能技术的发展,极大地提高现有水下航行器的自主能力。
3. 总 结
AUV是经略海洋,实现“海洋进入、海洋探测、海洋利用”的核心装备之一,具有长航时、远航程、大深度、自主能力强、使命功能广等优势。随着AUV技术不断向成熟迈进,其任务执行范围也逐渐从浅海到深海,使命功能从辅助到中心,任务执行方式从单体到集群,逐步成为海上作战力量的重要组成部分。
多学科优化设计技术作为提升AUV性能的有效手段,在总体设计中发挥着重要作用。随着AUV形态特征与任务需求从单一到多样,总体系统的复杂程度也随之提高,要想在概念设计与详细设计阶段寻得最优方案,单纯地依赖经验将变得十分困难。未来,总体系统性能评估将依赖高精度的仿真模型,系统搭建也将融合各类型仿真求解工具,因此,开发适用于协同仿真环境的多学科优化设计技术,充分利用历史数据寻找最优设计区域是未来的发展趋势。
随着技术的不断发展,新型轻量化复合材料(碳纤维复合材料、玻璃纤维复合材料、陶瓷基复合材料等)在水下AUV结构中的占比将不断提高,应用也将更加广泛。此外,复合材料还具有良好的吸声、吸波特性,因此研究复合材料吸波−承载结构功能一体化技术将是未来AUV结构发展的趋势,将在AUV结构中占据越来越重要的地位,为形成结构重量轻、负载能力强、隐身性能好的AUV提供技术基础。
AUV动力与推进技术的发展应在紧密结合需求的基础上,融合先进的系统设计方法与新技术,实现提升动力与推进系统的综合性能。在动力与推进系统的设计新方法方面,应基于总体功能需求,针对功率电池、推进电机和推进器等组成部分,采用多系统、多学科耦合的优化设计思路,结合先进的多目标优化算法、机器学习等人工智能技术手段,实现动力推进系统的高紧凑性、高机动性和高效率化。在动力与推进系统的设计新技术方面,应从耐压电池、混合能源、无线充电等能源技术方面,从新型电机、新型材料、增材制造等电机技术方面,以及仿生推进、高效推进控制、群游节能机制等推进器技术方面,实现动力与推进系统的优化衍变。
导航定位对AUV任务的安全性和有效性来说至关重要。近年来,导航与定位(包括地球物理导航、组合导航、协同导航及即时定位与地图构建(simultaneous localization and mapping,SLAM)等)技术得到了显著提高,协同导航在未来AUV导航与定位领域将变得更加重要。对于AUV导航与定位领域的未来研究,一个关键的挑战是开发用于深远海作业的导航定位技术,未来,可结合自主对接技术与水下网络通信技术,实现AUV长期在深海区域的部署,解决AUV需定时浮出水面进行定位校准,以及能源补给困难等问题,实现AUV在深远海区域的长期、持续任务工作。
未来,在AUV探测通信方向上,应紧密结合应用背景和平台特点,重点突破强背景噪声下的信号处理、时变信道估计、载荷声兼容、探通一体化波形设计、基于AUV的多基地探测、稳健组网协议栈、非线性信号检测理论、低频线谱信号增强、异构多源信息融合等关键技术,提升AUV在高速运动条件下的通信速率和链路稳健性,增强AUV集群协同的主被动探测能力,构建可长期自持、大范围机动的水下自主无人观测、探测与作业集群。
高效能的水下无人集群是未来水下空间交战的重要力量,然而在一段时期内,技术的发展又离不开有人平台的控制,因此,未来无人装备与有人装备组成的混合编队将是水下作战的发展趋势。有人、无人协同作战可充分利用有人平台的信息处理、协同组织和决策能力,以及无人平台的隐身性、长航时、集群性等特点,来提升系统的协同区域探测与协同攻击能力;水下无人集群系统的感知探测、协同打击等能力的组合优化可进一步提升系统的生存能力。有人、无人集群作战在空中、水面和水中所形成的多维度立体式的作战网络,具有传统平台所不具备的隐蔽性、抗损伤性及可重构等功能,可以更好地完成对抗环境下的多维度水下空间作战任务。
-
![]()
图 3 中科院沈阳自动化研究所研制的系列水下航行器
Figure 3. A series of underwater vehicles developed by Shenyang Institute of Automation Chinese Academy of Sciences
![]()
图 4 哈尔滨工程大学研制的HSU001水下航行器
Figure 4. HSU001 underwater vehicle developed by Harbin Engineering University
![]()
图 5 哈尔滨工程大学研制的“悟空”号全海深AUV
Figure 5. Wukong full-sea deep AUV developed by Harbin Engineering University
![]()
图 15 高维代理模型预测技术HDMR-RBF方法
Figure 15. HDMR-RBF method of high-dimensional surrogate model prediction technology
![]()
图 16 数据驱动的多学科优化设计:以翼身融合水下滑翔机为例
Figure 16. Data-driven multidisciplinary optimization design: a case study of a wing-body fusion underwater glider
![]()
图 17 耗时仿真系统优化流程示意图
Figure 17. Schematic diagram of optimization process of time-consuming simulation system
![]()
图 18 耐压壳体极限深度与重浮比关系
Figure 18. The relationship between the ultimate depth of the pressure shell and the re-float ratio
![]()
图 19 陶瓷复合材料与金属材料参数对比
Figure 19. Comparison of parameters between ceramic composites and metal materials
![]()
图 24 西北工业大学研制的水下非接触式充电装置(回转体式和开架式)
Figure 24. underwater non-contact charging device developmentde by Northwestern Polytechnical University (rotary body type and open frame type)
![]()
图 26 大功率跨度推进电机效率优化效果对比
Figure 26. Efficiency optimization effect comparison of large power span propulsion motors
![]()
图 27 捷联惯性导航系统原理图
Figure 27. Schematic diagram of strap-down inertial navigation system
![]()
图 28 SINS/DVL组合导航系统原理图
Figure 28. Schematic diagram of SINS/DVL integrated navigation system
![]()
图 29 基于协调方式分类的导航方式图
Figure 29. Navigation mode diagram based on coordination mode classification
![]()
表 1 Bluefin系列水下航行器设计参数
Table 1 Design parameters of Bluefin series of underwater vehicle
型号 长度/m 直径/m 重量/kg 最大工作深度/m 续航力/h Bluefin-9 1.65 0.240 50 200 12 (3 kn) Bluefin-12S 3.66 0.324 213 200 20 (5 kn) Bluefin-12D 4.33 0.324 260 1500 30 (4 kn) Bluefin-21 3.80 0.656 750 4500 25 (4 kn)  下载: 导出CSV
下载: 导出CSV
表 2 Remus系列水下航行器设计参数
Table 2 Design parameters of Remus series of underwater vehicle
型号 长度/m 直径/m 重量/kg 最大工作深度/m 续航力/h Remus 100 1.32 0.190 37 100 15 (3 kn) Remus 600 3.25 0.324 240 600 70 (5 kn) Remus 3000 3.70 0.356 335 3 000 44 (4 kn) Remus 6000 3.84 0.71 864 6 000 22 (4 kn)
下载: 导出CSV
表 3 水声定位系统分类
Table 3 Classification of hydroacoustic positioning systems
定位类型 基线长度/m LBL 100~600 SBL 1~50 USBL <1
下载: 导出CSV
-
[1] 潘光, 宋保维, 黄桥高, 等. 水下无人系统发展现状及其关键技术[J]. 水下无人系统学报, 2017, 25(2): 44–51. PAN G, SONG B W, HUANG Q G, et al. Development and key techniques of unmanned undersea system[J]. Journal of Unmanned Undersea Systems, 2017, 25(2): 44–51 (in Chinese).
[2] 李德远, 吴汪洋, 李晓晨. 军用UUV的发展与应用前景展望[J]. 舰船电子工程, 2012, 32(4): 22–24, 35. doi: 10.3969/j.issn.1627-9730.2012.04.008 LI D Y, WU W Y, LI X C. Current status and future directions of navy unmanned underwater vehicles[J]. Ship Electronic Engineering, 2012, 32(4): 22–24, 35 (in Chinese). doi: 10.3969/j.issn.1627-9730.2012.04.008
[3] 钱东, 赵江, 杨芸. 军用UUV发展方向与趋势(上)——美军用无人系统发展规划分析解读[J]. 水下无人系统学报, 2017, 25(2): 1–30. QIAN D, ZHAO J, YANG Y. Development trend of military UUV (Ⅰ): a review of U. S. military unmanned system development plan[J]. Journal of Unmanned Undersea Systems, 2017, 25(2): 1–30 (in Chinese).
[4] 李经. 水下无人作战系统装备现状及发展趋势[J]. 舰船科学技术, 2017, 39(1): 1–5, 36. doi: 10.3404/j.issn.1672-7619.2017.01.001 LI J. Existence and development trend of navy autonomous underwater combat system[J]. Ship Science and Technology, 2017, 39(1): 1–5, 36 (in Chinese). doi: 10.3404/j.issn.1672-7619.2017.01.001
[5] 钟宏伟. 国外无人水下航行器装备与技术现状及展望[J]. 水下无人系统学报, 2017, 25(4): 215–225. doi: 10.11993/j.issn.2096-3920.2017.03.001 ZHONG H W. Review and prospect of equipment and techniques for unmanned undersea vehicle in foreign countries[J]. Journal of Unmanned Undersea Systems, 2017, 25(4): 215–225 (in Chinese). doi: 10.11993/j.issn.2096-3920.2017.03.001
[6] 吕达. 翼身融合水下滑翔机稳定面设计及滑翔性能分析[D]. 西安: 西北工业大学, 2020. LYU D. Design of stable surface and gliding performance analysis of wing-body fusion underwater glider[D]. Xi'an: Northwestern Polytechnical University, 2020 (in Chinese).
[7] 张栋. 牛鼻鲼游动过程中柔性变形对水动力影响研究[D]. 西安: 西北工业大学, 2020. ZHANG D. Research on the influence of flexible deformation on hydrodynamics during the swimming process of the cow-nosed ray[D]. Xi'an: Northwestern Polytechnical University, 2020 (in Chinese).
[8] 聂卫东, 马玲, 张博, 等. 浅析美军水下无人作战系统及其关键技术[J]. 水下无人系统学报, 2017, 25(5): 310–318. NIE W D, MA L, ZHANG B, et al. A brief analysis of United States unmanned underwater combat system[J]. Journal of Unmanned Undersea Systems, 2017, 25(5): 310–318 (in Chinese).
[9] 钟宏伟, 李国良, 宋林桦, 等. 国外大型无人水下航行器发展综述[J]. 水下无人系统学报, 2018, 26(4): 273–282. doi: 10.11993/j.issn.2096-3920.2018.04.001 ZHONG H W, LI G L, SONG L H, et al. Development of large displacement unmanned undersea vehicle in foreign countries: a review[J]. Journal of Unmanned Undersea Systems, 2018, 26(4): 273–282 (in Chinese). doi: 10.11993/j.issn.2096-3920.2018.04.001
[10] LI J L, WANG P, DONG H C, et al. Multi/many-objective evolutionary algorithm assisted by radial basis function models for expensive optimization[J]. Applied Soft Computing, 2022, 122: 108798. doi: 10.1016/j.asoc.2022.108798
[11] LI J L, WANG X J, WANG P, et al. Shape optimization for a conventional underwater glider to decrease average periodic resistance[J]. China Ocean Engineering, 2021, 35(5): 724–735. doi: 10.1007/s13344-021-0064-6
[12] ZHANG N, WANG P, DONG H C. Research on high-dimensional model representation with various metamodels[J]. Engineering Optimization, 2019, 51(8): 1336–1351. doi: 10.1080/0305215X.2018.1521398
[13] FU C B, WANG P, ZHAO L, et al. A distance correlation-based Kriging modeling method for high-dimensional problems[J]. Knowledge-Based Systems, 2020, 206: 106356. doi: 10.1016/j.knosys.2020.106356
[14] MOHAMMAD ZADEH P, MEHMANI A, MESSAC A. High fidelity multidisciplinary design optimization of a wing using the interaction of low and high fidelity models[J]. Optimization and Engineering, 2016, 17(3): 503–532. doi: 10.1007/s11081-015-9284-z
[15] DONG H C, SONG B W, WANG P, et al. Multi-fidelity information fusion based on prediction of Kriging[J]. Structural and Multidisciplinary Optimization, 2015, 51(6): 1267–1280. doi: 10.1007/s00158-014-1213-9
[16] 李学斌, 甘霖. AUV总体概念设计中的多学科和多目标优化研究[J]. 海洋技术, 2008, 27(2): 77–82. doi: 10.3969/j.issn.1003-2029.2008.02.018 LI X B, GAN L. Study on multi-disciplinary design and multi-objective problem in conceptual design of AUV[J]. Ocean Technology, 2008, 27(2): 77–82 (in Chinese). doi: 10.3969/j.issn.1003-2029.2008.02.018
[17] 王建. 多学科优化设计在水下无人航行器设计中的应用研究[D]. 哈尔滨: 哈尔滨工程大学. WANG J. Application of multi-discipline design optimization method for design of unmanned underwater vhicles[D]. Harbin: Harbin Engineering University (in Chinese).
[18] LUO W L, LYU W. An application of multidisciplinary design optimization to the hydrodynamic performances of underwater robots[J]. Ocean Engineering, 2015, 104: 686–697. doi: 10.1016/j.oceaneng.2015.06.011
[19] ZHANG X H, LI Z, WANG P, et al. Experimental and numerical analyses on buckling and strength failure of composite cylindrical shells under hydrostatic pressure[J]. Ocean Engineering, 2022, 249: 110871. doi: 10.1016/j.oceaneng.2022.110871
[20] WEI R F, SHEN K C, PAN G. Optimal design of trapezoid stiffeners of composite cylindrical shells subjected to hydrostatic pressure[J]. Thin-Walled Structures, 2021, 166: 108002. doi: 10.1016/j.tws.2021.108002
[21] RAHIMI G H, ZANDI M, RASOULI S F. Analysis of the effect of stiffener profile on buckling strength in composite isogrid stiffened shell under axial loading[J]. Aerospace Science and Technology, 2013, 24(1): 198–203. doi: 10.1016/j.ast.2011.11.007
[22] 何衍儒, 宋保维, 曹永辉. 翼身融合自主式水下航行器的多泡结构耐压舱分步优化设计[J]. 西北工业大学学报, 2018, 36(4): 664–670. doi: 10.3969/j.issn.1000-2758.2018.04.009 HE Y R, SONG B W, CAO Y H. Multi-step structural optimization design of multi-bubble pressure cabin in the autonomous underwater vehicle with blended-wing-body[J]. Journal of Northwestern Polytechnical University, 2018, 36(4): 664–670 (in Chinese). doi: 10.3969/j.issn.1000-2758.2018.04.009
[23] 伍莉, 孟凡明, 陈小宁, 等. 藕节形大深度潜水器耐压壳体优化设计[J]. 船舶力学, 2008, 12(1): 100–109. doi: 10.3969/j.issn.1007-7294.2008.01.015 WU L, MENG F M, CHEN X N, et al. Optimum design of multiple intersecting spheres great deep-submerged pressure hull[J]. Journal of Ship Mechanics, 2008, 12(1): 100–109 (in Chinese). doi: 10.3969/j.issn.1007-7294.2008.01.015
[24] 宋保维, 成鹏飞, 曹永辉, 等. 藕节形耐压壳体强度与稳定性有限元分析[J]. 计算机仿真, 2013, 30(2): 38–41, 246. doi: 10.3969/j.issn.1006-9348.2013.02.010 SONG B W, CHENG P F, CAO Y H, et al. Strength and stability study of multiple intersecting spheres for pressure hull[J]. Computer Simulation, 2013, 30(2): 38–41, 246 (in Chinese). doi: 10.3969/j.issn.1006-9348.2013.02.010
[25] 李星升, 关静岩. 泵喷推进器在某水下航行器降噪方面的应用[J]. 数字海洋与水下攻防, 2018, 1(2): 51–56. LI X S, GUAN J Y. Application of pump-jet propulsor in noise reduction of underwater vehicle[J]. Digital Ocean & Underwater Warfare, 2018, 1(2): 51–56 (in Chinese).
[26] 方尔正, 周子凌, 桂晨阳. 水下滑翔机原理与应用[J]. 国防科技工业, 2020(8): 66–68. FANG E Z, ZHOU Z L, GUI C Y. The principle and application of underwater glider[J]. Defence Science & Technology Industry, 2020(8): 66–68 (in Chinese).
[27] 邢城, 潘光, 黄桥高. 仿蝠鲼柔性潜水器翼型流场性能分析[J]. 数字海洋与水下攻防, 2020, 3(3): 265–270. doi: 10.19838/j.issn.2096-5753.2020.03.015 XING C, PAN G, HUANG Q G. Performance analysis of airfoil flow field of a mannequin-like flexible submersible[J]. Digital Ocean & Underwater Warfare, 2020, 3(3): 265–270 (in Chinese). doi: 10.19838/j.issn.2096-5753.2020.03.015
[28] 胡小平. 导航技术基础[M]. 北京: 国防工业出版社, 2015: 123-124. HU X P. Basics of navigation technology[M]. Beijing: National Defense Industry Press, 2015: 123-124 (in Chinese).
[29] 周玲. 自主水下潜器海底地形辅助导航技术研究[D]. 南京: 东南大学, 2018. ZHOU L. On seabed terrain aided navigation technology for autonomous underwater vehicles[D]. Nanjing: Southeast University, 2018 (in Chinese).
[30] 彭富清, 霍立业. 海洋地球物理导航[J]. 地球物理学进展, 2007, 22(3): 759–764. doi: 10.3969/j.issn.1004-2903.2007.03.015 PENG F Q, HUO L Y. Marine geophysical navigation[J]. Progress in Geophysics, 2007, 22(3): 759–764 (in Chinese). doi: 10.3969/j.issn.1004-2903.2007.03.015
[31] 黄玉龙, 张勇刚, 赵玉新. 自主水下航行器导航方法综述[J]. 水下无人系统学报, 2019, 27(3): 232–253. doi: 10.11993/j.issn.2096-3920.2019.03.002 HUANG Y L, ZHANG Y G, ZHAO Y X. Review of autonomous undersea vehicle navigation methods[J]. Journal of Unmanned Undersea Systems, 2019, 27(3): 232–253 (in Chinese). doi: 10.11993/j.issn.2096-3920.2019.03.002
[32] 王博, 周明龙. 水下重力辅助导航适配区选取的研究进展[J]. 导航定位学报, 2020, 8(3): 32–39. doi: 10.3969/j.issn.2095-4999.2020.03.005 WANG B, ZHOU M L. Perspective on matching area selection technology for underwater gravity aided navigation[J]. Journal of Navigation and Positioning, 2020, 8(3): 32–39 (in Chinese). doi: 10.3969/j.issn.2095-4999.2020.03.005
[33] 刘莉娜, 刘任庆. 基于捷联惯性导航的组合导航系统研究[J]. 现代电子技术, 2009, 32(3): 111–113. doi: 10.3969/j.issn.1004-373X.2009.03.035 LIU L N, LIU R Q. Research of integrated navigation system based on strapdown inertial navigation system[J]. Modern Electronics Technique, 2009, 32(3): 111–113 (in Chinese). doi: 10.3969/j.issn.1004-373X.2009.03.035
[34] CHANG L B, HU B Q. Robust initial attitude alignment for SINS/DVL[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(4): 2016–2021. doi: 10.1109/TMECH.2018.2834917
[35] BATISTA P, SILVESTRE C, OLIVEIRA P. GES integrated LBL/USBL navigation system for underwater vehicles[C]//2012 IEEE 51st IEEE Conference on Decision and Control (CDC). Maui, HI, USA: IEEE, 2012: 6609–6614.
[36] ZHANG L C, LI Y C, LIU L, et al. Cooperative navigation based on cross entropy: dual leaders[J]. IEEE Access, 2019, 7: 151378–151388. doi: 10.1109/ACCESS.2019.2947541
[37] MENSING C, NIELSEN J J. Centralized cooperative positioning and tracking with realistic communications constraints[C]//2010 7th Workshop on Positioning, Navigation and Communication. Dresden, Germany: IEEE, 2010: 215–223.
[38] GOEL S. A distributed cooperative UAV swarm localization system: development and analysis[C]//Proceedings of the 30th International Technical Meeting of The Satellite Division of the Institute of Navigation. Portland, Oregon, 2017: 2501–2518.
[39] 张伟, 王乃新, 魏世琳, 等. 水下无人潜航器集群发展现状及关键技术综述[J]. 哈尔滨工程大学学报, 2020, 41(2): 289–297. doi: 10.11990/jheu.201909039 ZHANG W, WANG N X, WEI S L, et al. Overview of unmanned underwater vehicle swarm development status and key technologies[J]. Journal of Harbin Engineering University, 2020, 41(2): 289–297 (in Chinese). doi: 10.11990/jheu.201909039
[40] CUI R X, GE S S, VOON EE HOW B, et al. Leader-follower formation control of underactuated autonomous underwater vehicles[J]. Ocean Engineering, 2010, 37(17–18): 1491–1502. doi: 10.1016/j.oceaneng.2010.07.006
[41] 潘无为. 分布式多水下机器人编队控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2018. PAN W W. Study on distributed formation control of multiple autonomous underwater vehicles[D]. Harbin: Harbin Engineering University, 2018 (in Chinese).
[42] FIORELLI E, LEONARD N E, BHATTA P, et al. Multi-AUV control and adaptive sampling in Monterey Bay[J]. IEEE Journal of Oceanic Engineering, 2006, 31(4): 935–948. doi: 10.1109/JOE.2006.880429
[43] YAN Z P, LIU Y B, ZHOU J J, et al. Consensus of multiple autonomous underwater vehicles with double independent Markovian switching topologies and timevarying delays[J]. Chinese Physics B, 2017, 26(4): 040203. doi: 10.1088/1674-1056/26/4/040203
[44] GAO Z Y, GUO G. Fixed-time leader-follower formation control of autonomous underwater vehicles with event-triggered intermittent communications[J]. IEEE Access, 2018, 6: 27902–27911. doi: 10.1109/ACCESS.2018.2838121
-
期刊类型引用(47)
1. 彭浩,李维波,黄康政,高俊卓. 基于BWO-SVM的AUV推进系统液压故障诊断. 机床与液压. 2025(03): 199-203 .  百度学术
百度学术
2. 许朝龙,解志斌,宋科宁. 基于轻量化网络的水下目标检测算法. 无线电工程. 2025(02): 264-270 . 百度学术
3. 张继文,徐博,王储岩,王朝阳. 基于神经动力学模型预测的多AUV编队自适应控制方案. 中国舰船研究. 2025(01): 326-339 . 本站查看
4. 王一,汪旋,王检耀,李相衡. AUV近水面波浪跟随控制及环境参数分析. 中国舰船研究. 2025(01): 340-349 . 本站查看
5. 熊露,李京书,饶喆,霍治帆. 水下航行器地形高程匹配算法研究综述. 水下无人系统学报. 2025(01): 1-14 . 百度学术
6. 余敏,刘浩煜,张文凯,汤奇荣. 自主水下航行器群探测行为关键技术分析. 舰船科学技术. 2025(03): 111-116 . 百度学术
7. 张犇,朱亚平,路勇. 基于环型线圈互感计算的WPT系统设计研究. 电力电子技术. 2024(01): 60-63 . 百度学术
8. 陈露,赵德鑫,王俊,高虹,陈迎亮. 基于通信载荷声纹特征的身份认证方法. 水下无人系统学报. 2024(01): 97-104 . 百度学术
9. 张严,朱伟良,程菲. 无人潜航器解算目标运动要素的一种方法. 现代电子技术. 2024(09): 173-176 . 百度学术
10. 齐嘉慧,崔培,姜楷娜,吕俊军. 一种UUV集群抵近目标侦测决策效率评估方法研究. 数字海洋与水下攻防. 2024(02): 231-235 . 百度学术
11. 邱志明,孟祥尧,马焱,王亮,肖玉杰. 海上无人系统跨域协同运用与技术发展. 水下无人系统学报. 2024(02): 184-193 . 百度学术
12. 于洋,孙思卿,张立川,潘光,王鹏. 自主水下航行器集群组网技术发展与展望. 水下无人系统学报. 2024(02): 194-207 . 百度学术
13. 付少波,关夏威,张昊. 基于自抗扰理论的欠驱动AUV无模型自适应路径跟踪控制. 水下无人系统学报. 2024(02): 328-336+375 . 百度学术
14. 吴昌脉,景易凡,王斌,阮华. 水下无人航行器多目标优化设计研究进展. 舰船科学技术. 2024(10): 9-15 . 百度学术
15. 石文会,金丽娜,马楠楠. 基于MPC的AUV轨迹跟踪控制研究. 现代信息科技. 2024(10): 188-193 . 百度学术
16. 王浩亮,任恩帅,卢丽宇,刘陆,古楠,彭周华. 面向海底管道巡检的AUV三维自适应路径跟踪. 船舶工程. 2024(04): 166-174 . 百度学术
17. 董鹏,汪超. 国外军用UUV发展现状与趋势. 机电设备. 2024(03): 31-36 . 百度学术
18. 赵高阳,刘勇,朱平杰,向冰,周洪娟. 基于有限元法的水下航行器地磁异常模拟研究. 系统工程与电子技术. 2024(07): 2191-2200 . 百度学术
19. 刘肖佐,王鹏,何瑞轩,李靖璐,董华超,温志文. 基于知识挖掘的HDMR优化方法与工程应用. 机械工程学报. 2024(13): 122-129 . 百度学术
20. 周楠,魏佳广,谢维维,冯晓伟. 海管监测ARV总体设计与试验. 数字海洋与水下攻防. 2024(04): 389-396 . 百度学术
21. 刘新宇,赵俊涛,佘莹莹,张英浩. IACO-GA-IPSO融合算法AUV三维全局路径规划. 舰船科学技术. 2024(18): 99-105 . 百度学术
22. 张志伟,方泽江,何润民,赵琪,朱兆彤. 美军水下特种作战装备的发展现状及趋势分析. 水下无人系统学报. 2024(05): 962-970 . 百度学术
23. 王旭,李金明,毛昭勇,丁文俊. 基于组合赋权TOPSIS的智能UUV目标识别与反对抗效能评估. 水下无人系统学报. 2024(05): 779-786 . 百度学术
24. 张翔鸢,花吉. 国外超大型无人潜航器发展与运用研究. 中国舰船研究. 2024(05): 17-27 . 本站查看
25. 赵大刚,张顺,高适,钟祥海. 海流对水下航行器运动及载荷影响研究综述. 中国舰船研究. 2024(05): 1-16 . 本站查看
26. 管志光,吴昊,王学林,林明星. 基于模糊PID的小型水下机器人运动控制研究. 火力与指挥控制. 2024(10): 111-117 . 百度学术
27. 高裕浩,何腾武,赵敏. 基于OpenMDAO的BLISS-2000多学科设计优化:流程、策略与参数研究. 中国舰船研究. 2024(06): 135-149 . 本站查看
28. 王兆杰,茆明,熊进辉,彭涛,李东鑫,孙牧,刘浩. 美军有人/无人协同反潜体系及杀伤链发展分析. 舰船科学技术. 2024(23): 184-189 . 百度学术
29. 赵卓,穆原子,周宁,杨俊飞. 基于船载无人机的海洋广域通信系统设计. 海洋技术学报. 2024(06): 12-19 . 百度学术
30. 李红,刘恒宇. 基于磁梯度方向的AUV地磁感知导航定向算法. 西安邮电大学学报. 2024(06): 27-33 . 百度学术
31. 武帅,张璨,李季,蔡春伟. 基于动态行波磁场的水下自主航行器无线电能传输系统. 导航与控制. 2024(Z1): 69-77 . 百度学术
32. 邱志明,马焱,孟祥尧,陈建华,冯炜. 水下无人装备前沿发展趋势与关键技术分析. 水下无人系统学报. 2023(01): 1-9 . 百度学术
33. 邱志明,孟祥尧,马焱,陈轶,冯炜. 海上无人系统发展及关键技术研究. 中国工程科学. 2023(03): 74-83 . 百度学术
34. 潘荣军,张伟. 基于机器学习的自主航行技术研究:探索人工智能在航海领域的应用. 中国水运(下半月). 2023(07): 46-49 . 百度学术
35. 金志刚,尹欢,洪叶,苏毅珊. 面向海洋监测的海空地协同边缘架构与拓扑控制. 西安交通大学学报. 2023(06): 47-55 . 百度学术
36. 王立志,石瑶,刘凯茜. 自主水下航行器技术发展与标准化需求. 船舶标准化与质量. 2023(01): 20-25 . 百度学术
37. 张亚军. 大型AUV及其水面侦察技术浅析. 数字海洋与水下攻防. 2023(04): 406-412 . 百度学术
38. 包艺,张庆辉,刘勇锋,李广华,张淼,陈效鹏,杜鹏. 水下仿生流场探测技术研究进展. 数字海洋与水下攻防. 2023(04): 458-471 . 百度学术
39. 李阁阁,贾世鲲,赵海侗,兰世泉,孙通帅,杨绍琼. 基于UUV的目标非声探测技术发展及趋势分析. 水下无人系统学报. 2023(04): 510-520 . 百度学术
40. 张宇新,李鹏,魏博,秦洪德. 水下航行器阻力计算及结构设计. 应用科技. 2023(05): 141-148 . 百度学术
41. 张怀亮. 水下能源供给平台电能供给技术发展现状及趋势. 船电技术. 2023(12): 15-19 . 百度学术
42. 童峰,周跃海,陈东升,李姜辉,张小康. 异构无人潜水器水声通信技术发展综述. 哈尔滨工程大学学报. 2023(11): 1963-1976 . 百度学术
43. 翟理,汪洋,胡利民,刘国海,刘亚兵,马恩林. 水下大功率高速电机SiC MOSFET逆变器设计及对比. 水下无人系统学报. 2023(06): 966-975 . 百度学术
44. 傅晓晗,付学志,王敏庆. 水下运载器声学性能预估. 水下无人系统学报. 2023(06): 871-877 . 百度学术
45. 李玉凯,吴影生,胡欲立. 新型Halbach阵列永磁屏蔽电机设计与优化研究. 微电机. 2023(12): 1-8 . 百度学术
46. 周道先,张吟龙,徐高飞,杨雨沱,梁炜. 基于形变卷积和深层聚合网络的水下文物检测. 仪器仪表学报. 2023(11): 185-195 . 百度学术
47. 潘荣军,张伟. 基于机器学习的自主航行技术研究:探索人工智能在航海领域的应用. 中国水运. 2023(14): 46-49 . 百度学术
其他类型引用(67)














计量
- 文章访问数: 3845
- HTML全文浏览量: 5450
- PDF下载量: 1619
- 被引次数: 114
